I’ve done a PR to fix this:
The Light looks like: https://www.youtube.com/watch?v=iF4ZGx5QM3A
it should go into master in the next day I expect
@Tridge,
Thank you verry much, I’m happy!!!
Still waiting for new props.
Otto
Hi Tridge,…is it yaw +tilt ? I am getting servo throw that sometimes point 180 deg in opposit direction to the point that the props will hit the mounts but not consistently? this is on illusion with 180 deg servos I can reprogram the servos for less throw, what paramiter to reduce yaw and tilt on the tilt servos?
thanks
Hi Tridge et al. Could the master be adapted to fly a quad motor tailsitter? Something like https://www.flitetest.com/articles/x-craft-review
yes, it could be, but it would require some significant code changes. I do have that one on my list of vehicles to support, but I doubt I’ll get to it for a while. The key thing it needs is to be able to use AP_Motors when in fixed wing flight for rate control
I discovered that APM Planner2 had most of the KMZ export functionality necessary to display aircraft orientation from DF logs. Current WIP is in https://github.com/ArduPilot/apm_planner/pull/1040
This is what my first attempt at a back transition looked like. (blue line is FBWA, green is QSTABILIZE)
very nice!
I can see this being very useful for analysing logs from users
Mission Planner will do this too using Create “KML+GPX” and clicking on “Models” in the KMZ in Google Earth
QHOVER and QLOITER work well in calm conditions so any problems must be airframe issues. Transitioning from FBWA to either of these modes is a bad idea on my plane. As the nose comes up it gains altitude, causing the engines to shut down as it tries to get back to the altitude where the transition started and the attitude goes wonky. Sometimes it recovers and sometimes it can’t catch it in time.
Wish I had some advise about wind other than avoid it. As you suspect, the most stable way seems to be head on. I tried sideways but I can’t give it much roll before the torque and associated yaw gets too much for it. I’d like to try increasing the maximum pitch angle to 90 degrees in Q modes. Is that possible? Can I set a roll limit and max yaw rate for Q modes somehow?
if what you want is to be able to pitch forward a lot you could set:
- LIM_PITCH_MIN=-7000
- Q_ANGLE_MAX=7000
the roll limit will come from LIM_ROLL_CD, and that wiill give you a 70 degree pitch range. It will also affect FBWA mode though, and that may be too much.
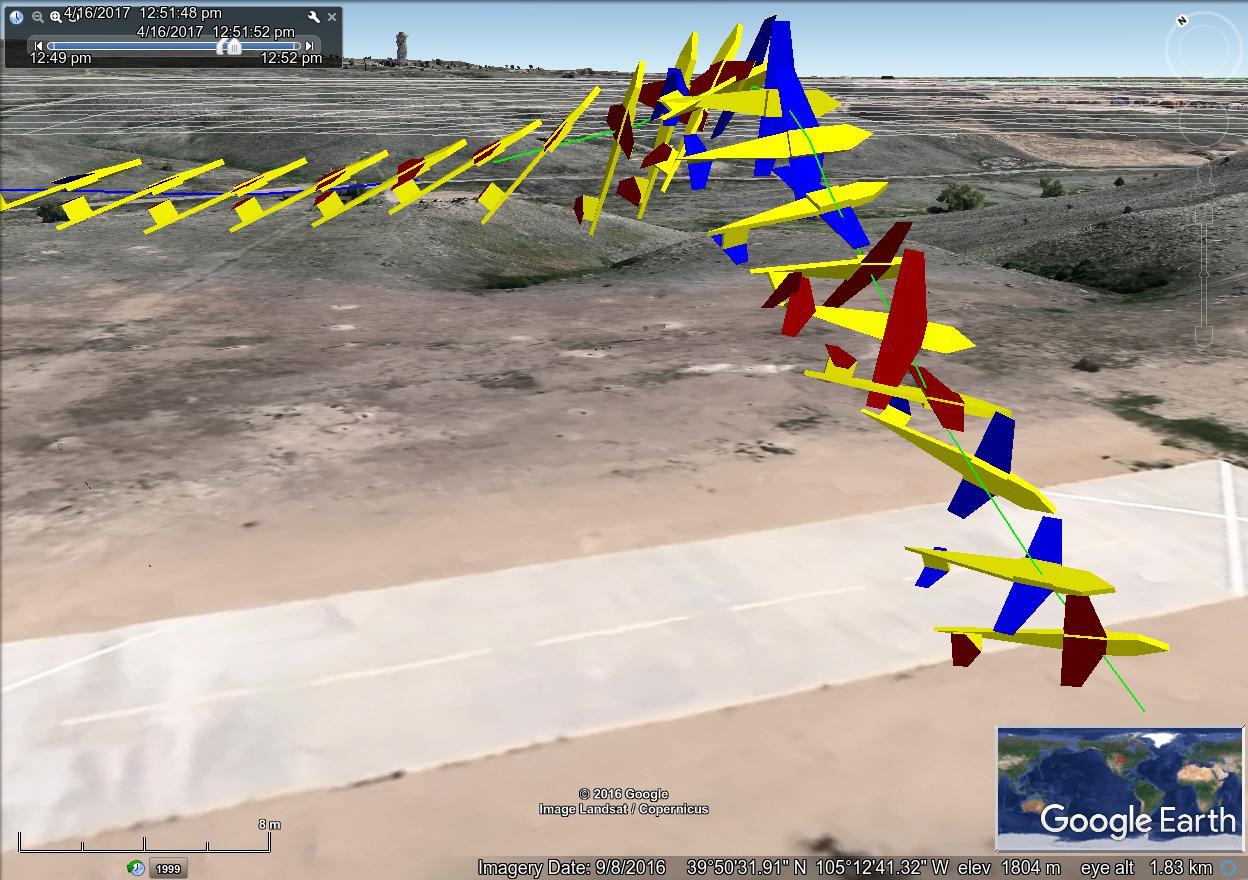
I’ve been working on the KML exporter in APMPlanner2 to help in analyzing tailsitter flightlogs. Here’s an example animation of a short QStabilize flight including takeoff and landing (tip-over backwards) done in Google Earth. The attitudes are taken from the XKQ1 (an EKF3 attitude quaternion) records and correctly represent the nose-up orientation during flight. Animation speed is 2X realtime. Link to mp4: https://drive.google.com/open?id=0Bw3digSMQXDuUmJnZ0ZSNFFNUUE
@tridge New Qstabilize flight log on latest master with the Stryker (AUAV-X2) log 50 in this folder: https://drive.google.com/open?id=0Bw3digSMQXDuWHFMRmwtMHMwekE
I think the PID tuning is pretty good now. There’s also a …50.kmz file in that folder which contains plane models showing EKF3 attitude XKQ1 at 5Hz. I think that’s working pretty well now.
that’s looking pretty good now!
that didn’t work for me. I opened it in Google Earth on windows10, and it just shows the whole planet. It doesn’t zoom to the flight area. Even selecting one WP doesn’t work.
After I get the lat/lon from the log I can find it, but it just shows some green squiggly lines.
GE should fly directly to the right coordinates when you open the kmz file. The green line is the flight path, which is enabled by default.
Here is a snapshot of what I see immediately after opening the kmz:
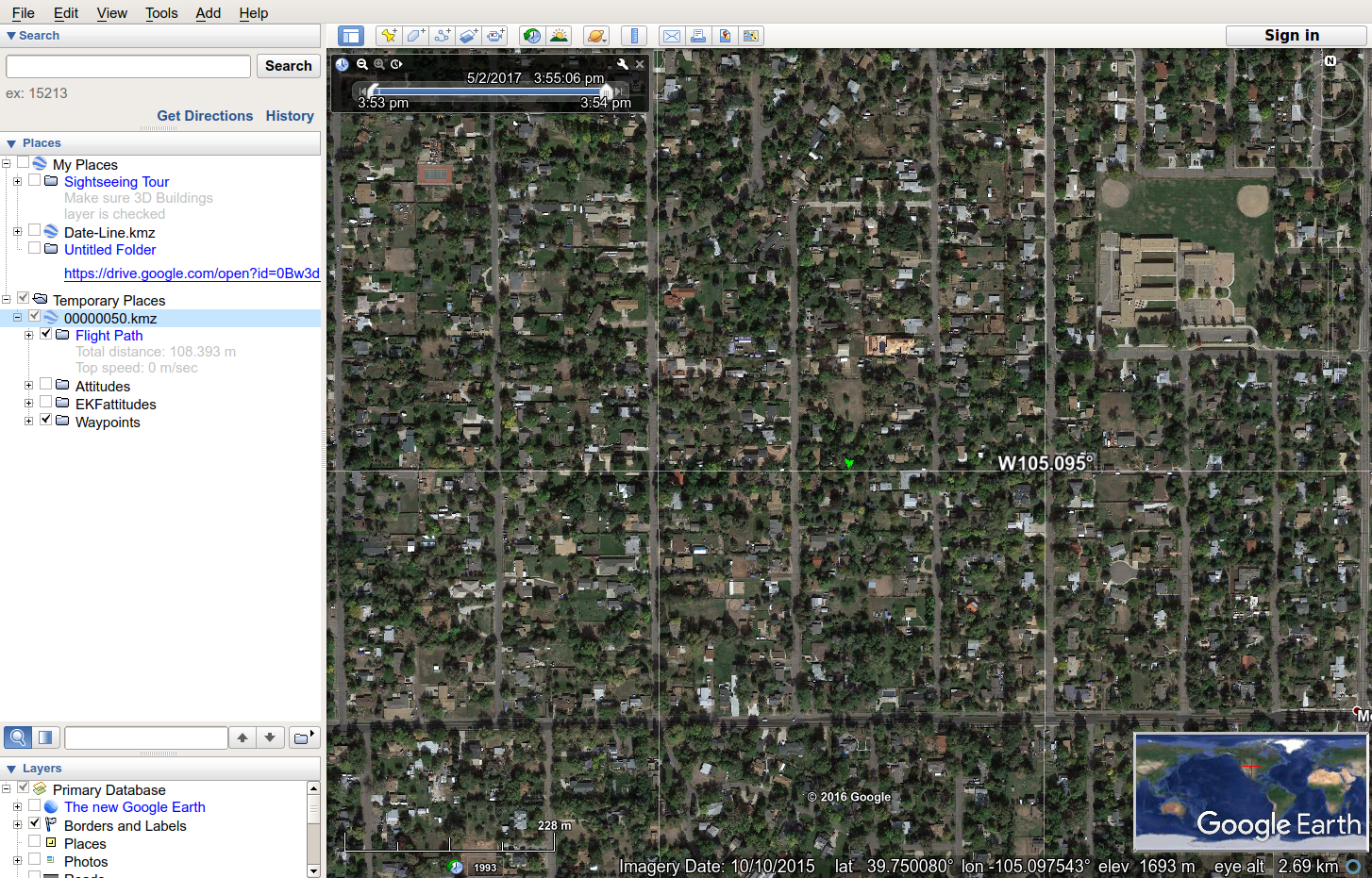
By default, the plane models are not displayed, since they can bog the display down, so it’s a good idea to select a small time range using the “time slider” at the upper left of the map. This is what you should see after checking the EKFattitudes box, selecting a short time interval and zooming in:

The “Attitudes” folder is based on the ATT record (AHRS_VIEW roll/pitch/yaw), so it will be rotated 90 degrees when in Qstabilize mode. The EKFattitudes folder is calculating Euler angles from the XKQ1 quaternion.
I’m running Google Earth 7.1.8.3036 (64 bit) on Ubuntu 16.04
interesting, I was testing on windows as I’ve previously found GE worked better on windows (it would always crash for me on Linux). Now I test it under Linux using the same version as you and it works as you describe. It also didn’t crash!
@tridge Glad to see the behavior on Linux is reproducible. Is the Windows version of GE older or newer? I believe @Arne-W reported that the plane icons were much larger than I’m seeing, and I think he’s also using Ubuntu. My PR for apmplanner2 is:
@tilt Just had a look at your 21.BIN log of the Illusion flight! It sure was a wild wide!
The most obvious thing is the tilt gains are far too high. I see you had Q_TAILSIT_VHGAIN set to 1.4, which I think is much too high. I’d suggest trying 0.5, and you may need to make it even lower.
I suspect you had it that high so that it would tilt the motors up a lot when on the ground. To do that I’d suggest raising the pitch IMAX a lot instead. So set Q_A_RAT_PIT_IMAX to 1 (up from 0.44).
Note that I have fixed the issue we had with you forwarding telemetry from your machine using MissionPlanner. If you’d like to try again and have me connected while you try a flight I’d be happy to do that.
@tilt note that your log shows servo outputs beyond the 1000 to 2000 range, despite the MIN/MAX being configured. I’ve just pushed a patch from @khancyr that fixes that.
Hey, Tridge ,
thought something was not right,how do I get that bug fix
went back to 4000 on both and hovered ok
will try the new ajustments you suggest
the weather has been windy and found that I am a pinch flyer and that limited my forward stick, corrected that and it handled gusts of 15+ mph but could use more forward tilt
how do we set up to fly,it was very dark last time we worked mission planner
Mr.Hall asked for bin21, maybe wait for his input ?
also,my download page keeps opening when i’m on this site (get player)?any idea what that is?