How did you flash the Master (via MP with Beta or MP via load custom fw)?
My Pixracer shows as PX4v4 in the Window Message in MP (left, down)
And after booting I hear 2 tones di- da (high, low) which sounds as error tones.
The flashing was reported as succesful.
I flashed now the Version V3.8.0beta4(a9b8e4b5) via MP with load Beta .The LED behaves now OK but
I’m not shure if I have the latest FW (Beta instead of Master)
I don’t use Mission Planner (I don’t use MS Windows at all); I build and flash the firmware on Ubuntu using these instructions: https://github.com/ArduPilot/ardupilot/blob/master/BUILD.md
Doesn’t MP have the option to flash master?
Ubuntu for me an other world, strange like the word “Ubuntu” 
I’m shure, it has advantages, but when I stated 40 years ago, it was not born there was DOS 3.0 standard
for IBM PC’s.
In MP we can flash the Versions: Stable, Beta, or Custom FW.
Stable and Beta checks and flash the correct FW according to the board.
The custom FW ist downloaded from here: http://firmware.eu.ardupilot.org/Plane/latest/PX4/
Where the correct file has to be selected manually.
Starting “load custom FW” we than can select the downloaded File.
With QGC it’s possible to load directly the Master ((41d99999)
And again, the safety switch does not function correct with Master V4
I assume you’re using a PixRacer and the V4 refers to FMU-v4?
I think the PixRacer does use different code for the safety switch/LED.
BTW, DOS isn’t quite 40 years old yet. My first computer is only 39 years old (1978): https://en.wikipedia.org/wiki/Heathkit_H11, and DOS 3.0 came out 6 years later in 1984.
I just flashed latest master to a PixRacer and boot is normal:
mavproxy shows commit 20f7d75b:
RTL> APM: ArduPlane V3.8.0beta4 (20f7d75b)
APM: PX4: 8d505a02 NuttX: 1a99ba58
APM: PX4v4 00230038 35355108 36353931
Received 919 parameters
before pressing safety switch I get a double blink on the LED, after pressing it I get a slow blink and that doesn’t change when armed. I’d think it should go solid.
This does look like a bug; with BRD_SAFETYENABLE set to 0 (default) the double-blink on boot is correct, but the light should go solid when the switch is pressed (instead I get a slow blink).
With BRD_SAFETYENABLE set to 1, I get the slow blink on boot (correct) and fast blink after pressing the switch.
Also, if ARMING_CHECK is not enabled for the safety switch, the LED should be on solid at all times, but this is not the case.
Love the idea of this simple VTOL setup. This is my first tail sitter build:
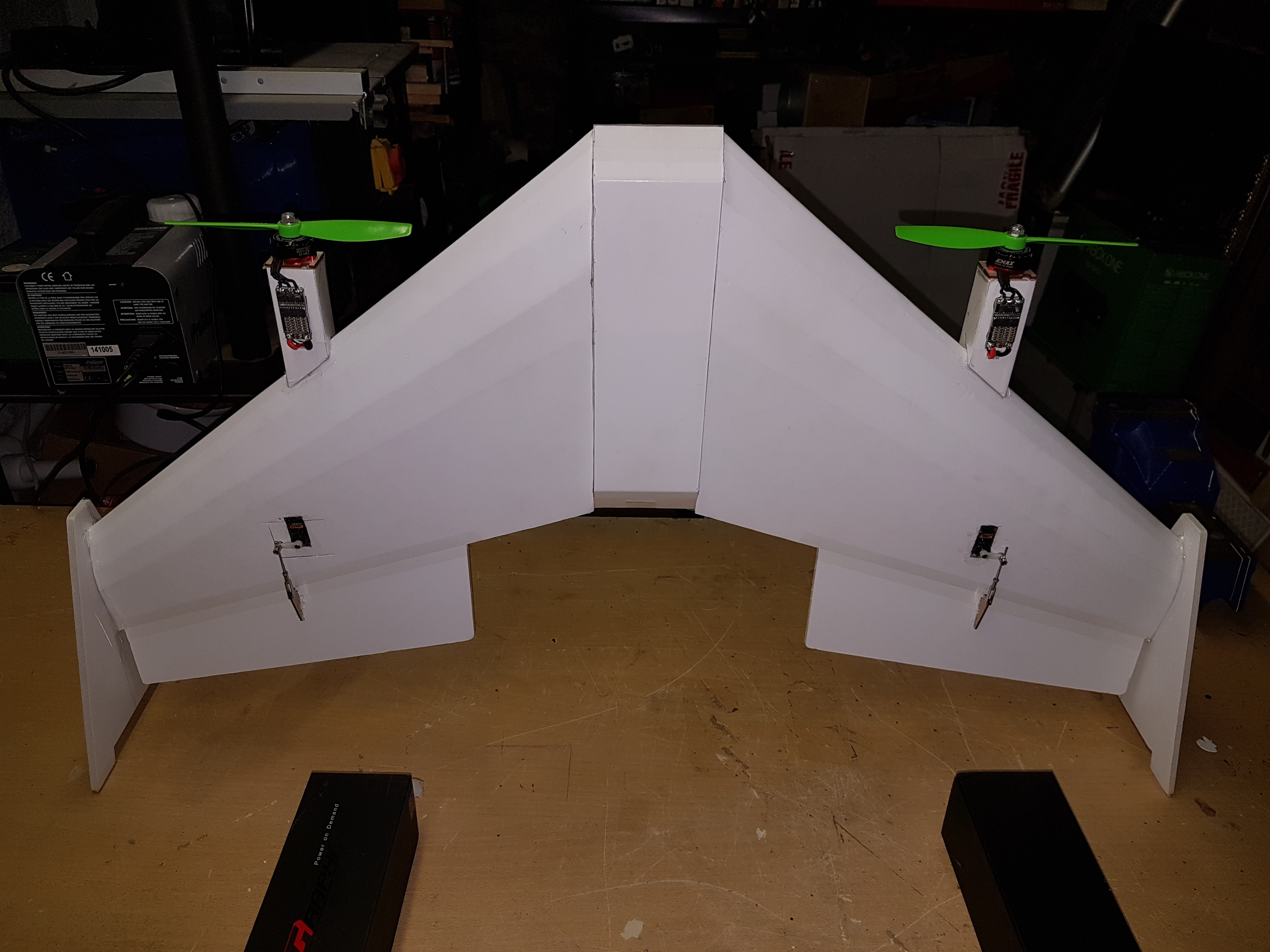
It’s a variant of the Flite Test Mini Arrow. I flew it on the latest stable release of Plane yesterday which went well.
Today, I tried it with V3.8.0beta4 on Pix Racer and had some mixed results. Hovering with no control input was stable on about 50% throttle. Roll response was minimal, pitch was ok, yaw was mostly nonexistent but sometimes seemed to give random amounts of roll, pitch and yaw all at once! I could tell it wasn’t going to end well on the first hover so tried a transition:
Cool! Tried to transition back but I have no instincts for how to correct this type of airframe. The controls seemed unresponsive except for throttle but after a certain amount of pitch over, the throttle also seemed to become unresponsive and down it went:
Looking at the logs, I don’t think it was a radio problem. No damage. Tried again:
Similar results. Minor damage to the left engine nacelle. Retired to the bench.
I hope some kind person will give me advice on how to proceed. I’ve put the data flash log here:
My thoughts are that maybe the motor directions need to be reversed. Is that a critical factor for yaw control with this design? I made the elevons really big. In manual mode it’s mega touchy yet in qstabilize there was almost no response despite the large deflections. Weird. Elevon mixing is set to 0.5 but behaves like 1.0 or 0.9.
If motor direction reverse doesn’t help, I’ll try moving the CG back a bit.
I hope this will be a good test platform as it’s very quick to build. The wiring took much longer than the air frame which has a total cost of £5 in foam board plus a barbecue skewer and takes about 4 hours to build.
2 Likes
Exactly, thanks for the confirmation.
@ag-sys Congratulations on the foamboard tailsitter. First video of a forward transition too.
Your airframe is definitely cheaper than my Stryker at $23 USD: https://tinyurl.com/kfu9y4w
Are your motor mounts also made of foam board?
@ag-sys Gratulation for your courage to translate in an early flight.
If the elevons are to small for hovering, they are really insufficient for the descent.
Here the solution of a high scool of Zurich. https://www.youtube.com/watch?v=QADvPDWtgFU
The elevons are larger than 1/3 of the wing.Seems to be nescessary.
I think, once the wing flips the FC reacts cracy. Tridge will find the reason.
Sound Bug in Plane 3.7… 3.8…Beta and Master with Pixracer Board. (V4)
After booting the well known sound “Start Up OK” is to hear: http://download.ardupilot.org/downloads/wiki/pixhawk_sound_files/PX4_StartUpOk.wav
and then a double tone similar to “Failed to Arm” : http://download.ardupilot.org/downloads/wiki/pixhawk_sound_files/failedToArm.wav but with longer tones.
But later Arming is possible.
With FW Rover or Copter this last doubletone is not to hear.
Doubtfull if this will have consequences during flight.
welcome, and congratulations on your first flights! Looks like a nice simple build.
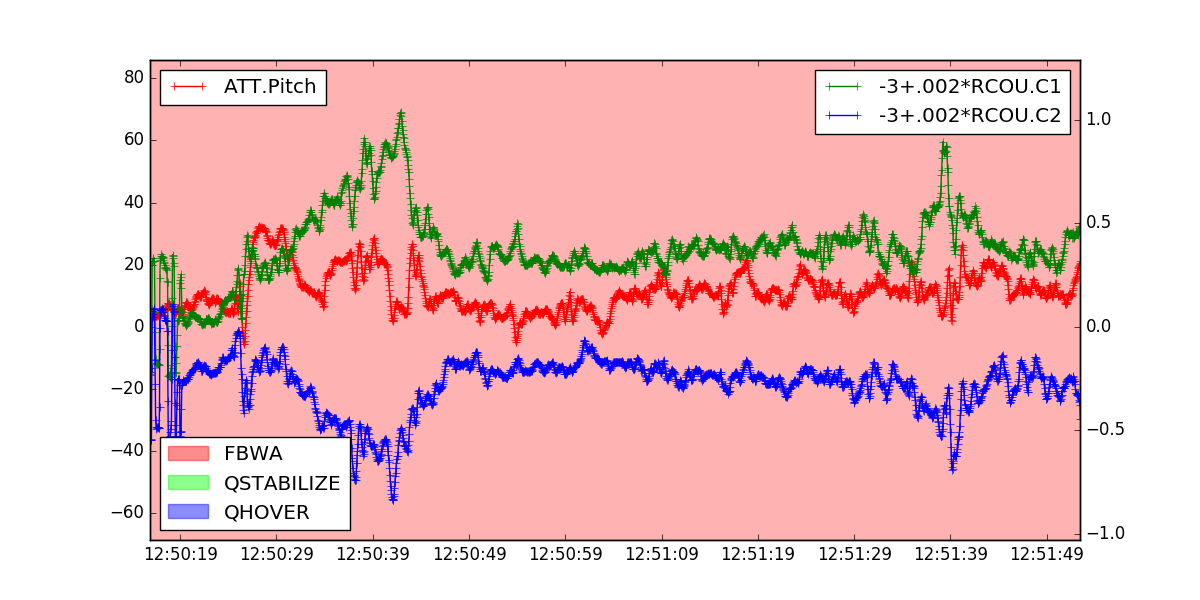
I’ve had a bit of a look, and the main thing is the pitch PID tuning in hover. Here is what the PID is doing:

There are two key things in this:
- when hovering, the CoG or trim is a bit off, so that the plane wants to naturally lean forward. The hover pitch controller quickly saturates its pitch integrator
- it is oscillating in the pitch PID output, driven by the P gain primarily
Can you move things around a bit so that the weight is a bit more even? You need more weight on the top side of the wing or less on the button. Otherwise try to angle the motors up a bit more. You should also increase the Q_A_RAT_PIT_IMAX to 0.8 (its currently 0.44) to give it more ability to compensate.
If you can get the weight right then your pitch will improve a lot. I suspect you should also lower the P gain a bit, but try it first with the weight distribution fix.
Let us know how it goes!
Cheers, Tridge
My elevons are mechanically trimmed for QSTABILIZE mode, and I need about 30% up deflection in fixed wing flight. This should be OK since very little elevon travel is needed in FW modes.
Tridge, thank you very much for taking the time to look at my logs, I wish I was half as good at analyzing them as you are!
The weather has been too windy for testing all week but I made it to the field this morning. I implemented all the changes you suggested. I also halved the roll and pitch P and I gains for fixed wing flight. My battery is attached under the wing so I was able to alter the weighting by using a smaller battery as a quick fix. My first flight was just a hover test. This time the craft felt much more controllable, responding as expected as long as I kept my inputs small. Whenever it started to get squirrely, a quick burst of power brought it level again. I was able to land with no issues.
For the second flight, I went with the original larger battery. The craft was still very controllable as long as I took it easy on the inputs. I think changing Q_A_RAT_PIT_IMAX from 0.44 to 0.8 had the greatest effect. Here’s the second flight with transition and landing:
https://youtu.be/Maz__AOTGhI
And the log:
https://drive.google.com/open?id=0B860_VUHDPWnQnEtamFIT2dhdVU
I’m thrilled with how this has been going, it’s a cool piece of code! Next time I’m going to push it a bit harder and check how it handles in mild wind. Does anyone have any advise regarding wind? I tend to land quads and planes into the wind but I feel like I should try to land at 90 degrees to the wind so as to present as small a surface area as possible, correcting my position with roll. I don’t know, we’ll see.
1 Like
and I’m thrilled that it is flying your plane so well! I think you have the most successful dual-motor tailsitter with ArduPilot so far.
When you fly next time, could you try some QHOVER and QLOITER? The QHOVER will test how well it maintains altitude automatically, and the QLOITER will test how well it maintains position too.
I suspect leaning into the wind is the right approach, but I really don’t know. If you can experiment and offer advice for others then that would be great!
Hi, congrats! I find into the wind is most pridictable and controlable, and do transitions upwind
Tridge , I volenteered us for NASA Mars project, see last comment on mvi 0160
Rick
cool! That would be really fun. Thanks!
@tridge,
I’m sorry, I have checked the safety procedure with 3 Controllers, each with Copter stable, Plane
stable, beta and latest. All systems could be switched to a stable Light on with nothing ready, just the controller
powered via USB. (Of course arming is then not possible)
The Pixracer PX4 V4 also but only with Plane stable and Beta of April 4.
But NOT with PX4 V4 latest.
The Light looks like: https://www.youtube.com/watch?v=iF4ZGx5QM3A
And if everything ist OK (no error messages) arming via Throttle is possible and the mots are running.
Bug also confirmed by.
For I had a shocking experiance with ignoring a strange behavior of the safety switch with a copter,
I do not dare to continue with this issue.
Here the result after one week, nerves cutted should help to understand my wariness.

@ag-sys Nice flight, congratulations. The transitions at 1:22 and 2:40 look great to me, and you seemed to have good control on the final descent and landing. I’ll be interested to see how well it hovers in the wind. Thanks for posting the log, too.
What are the current spikes on the transitions?

I’m not sure what the current spikes are. There are also corresponding spikes on the CTUN.ThrOut graph but not on RCIN.C3. The motor / prop combination will pull about 25A each on 3s so 58A seems about right for full throttle spooling up.
The motor mounts are made of 2mm ply wood, same dimensions as the Flite Test Mini Arrow.
I’m also interested to see what happens in the wind. Today it’s 15 - 20 mph so a little too much for my liking. I want to work up to that level gradually. I’ll be trying out QLOITER on my next flight too.
you’re right, and I’ve reproduced the issue here. It seems to be specific to Pixracer. I’ll see if I can find the bug soon.