Tridge, thanks for your response, I know all developers are busy people.
I don’t have any pictures, nothing is built yet (except for a really ugly bent up plank that I’ve been using to learn ardupilot).
I may take up Mr. Hall and Riseborough’s help at some point, I would like their contact information if you would.
I’m not familiar with any flight simulation software, would RF9 be able to estimate rotation rates based on the size of the elevons? Or perhaps it doesn’t allow that kind of customization. Very good tutorial you made here btw: https://ardupilot.org/dev/docs/sitl-with-realflight.html
I will indeed focus on minimizing vibrations with isolation mechanisms.
Good advice on the tether, I have a switch that disarms the craft, that will always kill the motors no?
I will share what I can.
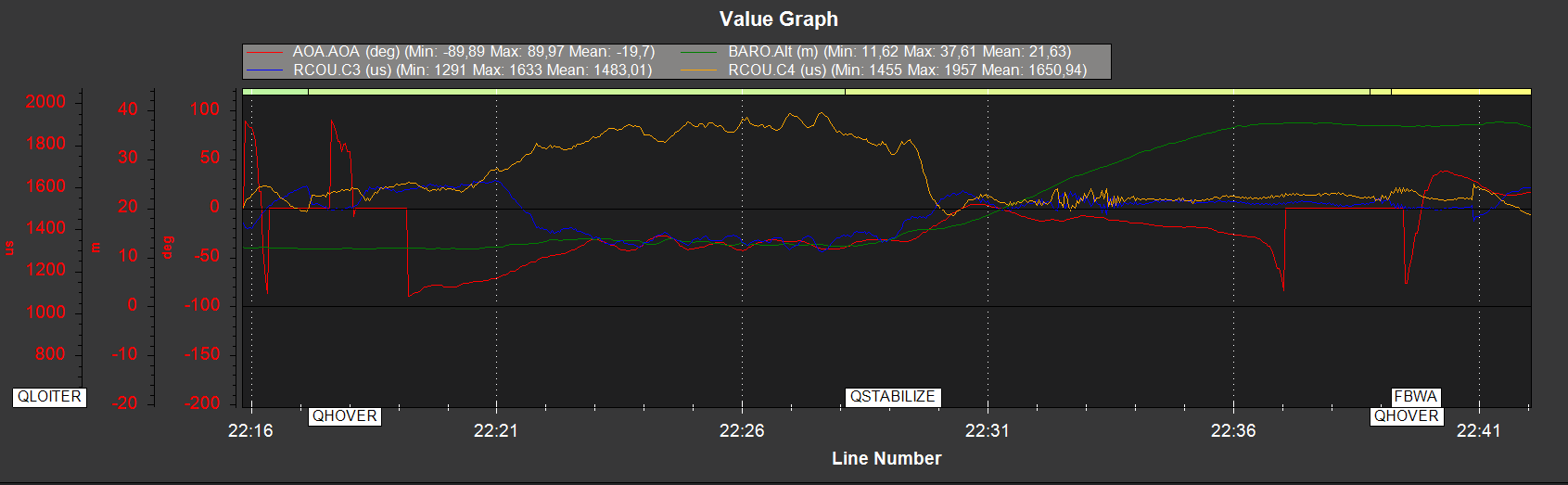
I have a thing about fwd transitions and FBWA, I don’t trust these modes mainly because I don’t have yaw stabilization (everytime I switch to FBWA my plank yaws out of control, I won’t be using fins so I need yaw stabilization). I’m actually able to fly the plank at high aoa’s in Qstabilize (imitating fwd flight) by increasing the Q_angle_max parameter. There’s significant oscillation at around 90 deg though, I need to try at 80 and see what happens. It’s also difficult to turn unless I ease up on the angle to around 70 deg. It’s to be expected, but I kind of want to be able to have it as my back up mode if Qacro doesn’t work.
Tridge, really important question for you- when in Qstabilize does the angle calculating algorithm use the GPS at all to help correct its orientation (or estimate its attitude)? I am aware that it does use an airspeed sensor to scale gains as discussed here https://ardupilot.org/plane/docs/qacro-mode.html
I think QACRO provides rate based yaw stabilization, so I think I’ll mess around with that mode and see what happens. Why doesn’t FBWA support differential thrust yaw stabilization anyways?
Any insight would be much appreciated, thanks
Shef