The main problem of non-vectored tailsitters is landing in the wind, like in your video.
Unfortunately Ardupilot struggles to understand the landing state on-ground, so just that a minimum of propulsion remains that the flip is automatic.
In the Wingtra I believe they have a sensor that detects the touch and turns off the motors immediately, a small laser or sonar, is the only way to reduce the chances of flips, which often break the support of the motors or propellers.
They also crashed several times on landing, in fact the motors mounts are fixed with three nylon screws, so that in the event of an impact any breakage of the motors mount does not compromise the fixing on the composite frame.
Another solution is to try the cross wind landing, but in that situation the tailsitter struggles to maintain control over the yaw.
PS: do not use Q_TRIM_PITCH, it has problems with the integral accumulation, there is an open issue of mine about this not yet solved.
I have the same behavior with the plane you can see post 2225. This is your log.
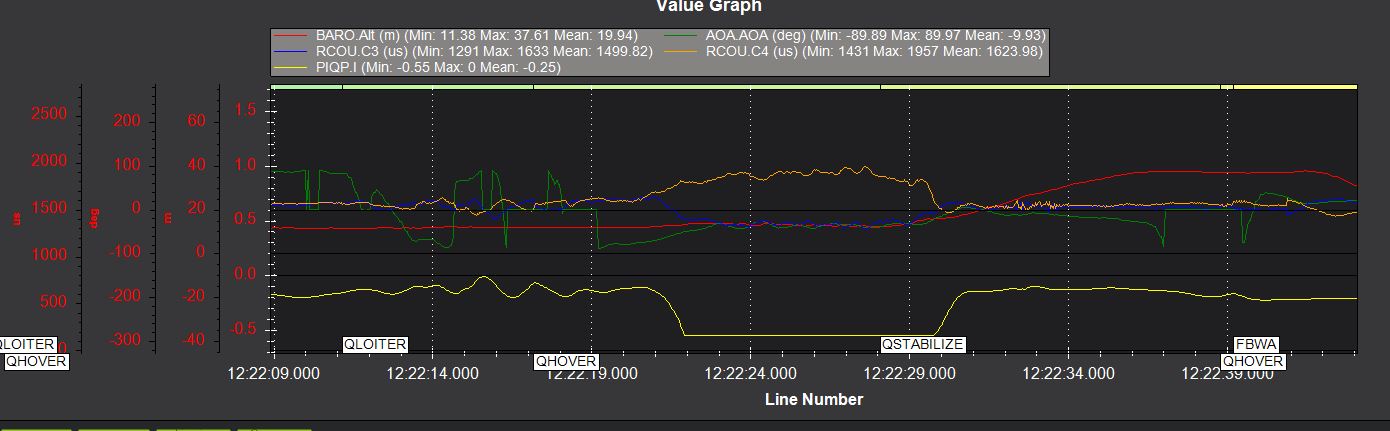
At medium lean angle, let say from 30 to 60° , the balance is obtained with too much elevons deflection so no room left for stabilisation. One traduction is the integral term saturation after 12:22:22. You can increase I and Imax up to 1 but it will not cure the root cause. The solution I am currently trying to implement is a variable CG. There are probably better and simpler solution but I did not find it.
On your video, I can see around 40s, a kind of ugly plane yaw danse. You can mitigate that behavior increasing q_a_rat_rll_d (until hearing throttle pulses while hovering vertical) and maybe lowering a little q_a_rat_rll_p.
Well, this land was my fault, I did not controled the throttle stick properly in QHOVER. On this other test flight that I attach below without transitions of the same day with the same wind I landed without problem. But if it is true that motors should be disassembled as soon as they touch land to avoid breakage of propellers and motor mounts, as you say. But in AUTO mode you can control it by decreasing LAND_DISARMDELAY = 1
Yes, I read your previous post about the problem with Q_TRIM_PITCH but decided to test it.on both flights I have Q_TRIM_PITCH = -3, and I takeoff both times in QSTABILICE without problems, without turning or flip.
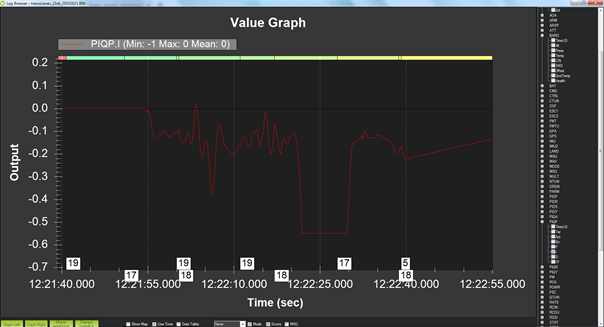
Indeed, in my PIQP_I graph, the flat interval coincides with that space of time in which it did not recover the vertical when centering the stick pitch.l
Mechanical variable CG does not seem like the ideal solution, it should be done by software
Then increasing Q_TRIM_PITCH or sinking the battery to the bottom of the fuselage to modify CG_Z, would not be possible alternatives.
I will test again by raising Q_A RAT_PIT_I / IMAX, although _I is now a high value (0.43)
I don´t like that roll movement, this roll oscillation coincides with the previous saturation interval > so I thought it was the same problem, because in vertical position does not have that roll oscillation.
See my video in Realflight about the Q_TRIM_PITCH issue:
Yes I have read your problem with Q TRIM PITCH but in my real test I have not see this flip with = -3
I was really scared after reading you but I observed that test takeoff at home (holding it lightly with my hand) with -3, takeoff it was more stable
The same issue you mentioned in post 2225, it was with 4.1 and using disk gain, right?
Then 4.1 does not correct this PIQP_ saturation.
This is not an issue, just the right behavior. The integral term I is just limited by Imax, otherwise it will increase as long as the error exist and that would be very bad. Probably there are people more qualified than me to explain.
But I believe that increasing Imax you can increase the maximum elevon deflection that I generate.
ok, I have understood the reasoning. I will test by increasing _IMAX
“does Qacro naturally try to soft-level”
QACRO mode uses only rate control when parameter ACRO_LOCKING is zero.
You can set that to one to enable full attitude control. This should help an airframe that doesn’t “track” well.
“forget about the old orientation”
And yes, if the “thrust angle” error in the multicopter attitude controller exceeds 30 degrees, it will begin to limit yaw corrections, trading off yaw control in favor of roll and pitch. I’m not sure if it isn’t supposed to eventually return to the desired heading though.
Hi Mark,
Are you sure Qacro uses the ACRO_LOCKING parameter? I just spent about an hour in RF9 trying to see a difference in QACRO when I would change the locking parameter and I can’t see any change in the attitude locking. Qacro with locking still allows pitch to drift quickly just as Qacro without locking.
Running SITL in RF9 I can say that the heading is forgotten if you yaw too much and a new heading is made to maintain.
Shef
EDIT: I was wrong, ACRO_LOCKING does affect Qacro, I have observed this in the elevons on the ground. Without locking the elevons quickly return to their neutral positions after input, but with locking the elevons stay in their deflected positions to some extent to get to the desired user orientation. I guess it’s just not so obvious in speedy forward flight.
It would be ideal if Arduplane could auto-disarm the motors at x cm altitude using a rangefinder for example but It does not use the altitude to decide whether to shut off the motors.
Arduplane use climb rate. Only if climb rate remains between -20cm/s and +20cm/s for one second.
I’ve just found a serious bug in PID handling for tailsitters:
we were not applying the FF term in hover for the elevons. We were applying it for motor tilt in vectored tailsitters.
This goes some way to explaining why tailsitters have been so hard to tune. We expect that in pitch and yaw that the FF would dominate in a good tune.
I have just finished a VTOL Tailsitter with twin motors. I followed most of the how to for the Vtol Q plane and have set up my perams to make Vtol Elevons quite reactive. But before all that, I did some workshop tests to calibrate the motors as per the instructions. So here is my problem.
At rest (disarmed) servos 5 and 6 are at 1100 (disarmed). I arm using radio 7 o/p to arm rather than Rudder.
On arming Servo Mot 5 sets a pulse count of 1132, Servo Mot 6 sets a pulse count of 1140. Throught the Thr range it stays the 8 points difference.
So when I set the plane up on my test rig, in Manual, raising Thr just makes the plane tilt to the left. So there is no chance of progressing with my testing till I sort this problem out. Even holding Rud Yaw is no good, the 8 point difference is still there
I have looked at all the perams in MP, but need some help. Can any one point me in the correct direction please.
can you share your parameters?
sounds like SERVO5_MAX and SERVO6_MAX may not be equal
disarmed the motors will be at SERVOx_MIN
armed in MANUAL such imbalance would appear as unmatched thrust, even if ESC calibration has been done simultaneously since thrust curves are non linear at the high end…
it would also show as an output imbalance in armed idle VTOL modes on the bench since the Q_M_SPIN_ARM is a percentage of the MAX-MIN range for each motor…
Thanks for the very quick reply. It will take me a while to unravle your replay and look at the perams. Sorry, but I just don’t know how to attatch my MP file to this reply, can you enlighten me please.
I have overcome all my initial problems and today did a first hover test, but it ended in disaster. I was in Q-Hover, and the plane lifted off. It drifted in the wind, so I tried to correct with forward elevator. As I pushed more in, the plane appeared to jump from hover to flight. Anyway, the result can be seen by watching the U-tube video. I have managed to extract a log,Bin file.that someone may be able to look at and perhaps explain what went wrong. I think I moved into manual as the plane went further away. Probably this is what caused the spin and crash.
I am hoping this forum is still monitored by Devs and ythat one can share their thoughts with me.
Here is my .Bin file of the flight
https://drive.google.com/file/d/12D5gmEd48HYslE6LYylxJY60Lbo38HfX/view?usp=sharing
file is protected and requires access permission
Try this, it should be open link
https://drive.google.com/file/d/12D5gmEd48HYslE6LYylxJY60Lbo38HfX/view?usp=sharing
Its a bit strange, once you start to lower the nose, it continues to increase the pitch error with the elevons basically not changing …are you sure you have them working to counter attitude changes in the right direction…ie put in QSTAB on the bench, and when vertical if you tip the nose down, the elevons raise?
same in FBWA on the bench…
this seems to either be the elevons are non effective or the directions are reversed…