If the Elevons are to far away from the Prop what about if the Props are between the Wing and the Elevons?
Marco, did you ever find out why you were seeing a huge thrust drop when you transitioned between FBWA to Qstabilize? I noticed the thread you made about it has been closed.
then its even more complex, right? I just would like to develop some wiki guidance for conventional vectored tailsitters…then add in the fun cases…
I find users usually dont have horrible tuning problems with planes, multicopters, and conventional quadplanes (that look like multicopters in VTOL stance)…and also those vehicles are usually easy to set down if acting unstable without damage since they are always horizontal in VTOL stance…but tailsitters are completely different in that regard…both in getting up and getting back down to earth, especially TVBS…and tuning non vectored is different than vectored is different than vectored with big effective fixed wing surfaces…I think that tailsitters would become more popular if there was a good guide to tune them…I know a guy that has been trying for months to get a non vectored dual motor tailsitters tuned as a proposal to his company as an alternate vtol using AP instead of their own code and is frustrated…
Hello Mr. Whitehorn, I have a question for you if you don’t mind.
Can you operate a dual-motored tailsitter in Qstabilize as well as FBWA without a GPS or compass?
You might save me a foamboard wing…thanks.
Shef
RE the Jumper T16: I just swapped out the ribbon cables in my T16 when my left slider and mode switch (SE) started acting up.
At the time (last August) Grayson was offering complete cable sets for free.
I have that problem with my T16s but Grayson never will respond to my emails…I have a month left on my RadioMaster T16s with Hall gimbals which now has crosstalk between sticks and occasionally just jumps on output value…I bought a T16SE to hold me over till it can be resolved…if ever
The EKF requires a 3D GPS fix to perform attitude estimation, so you can’t fly a quadplane without a GPS. I’ve never tried doing without a compass, but that’s probably possible. Try searching the forums to see if it’s been reported.
Re: the PIQY target and actual rates, I’d try increasing the D gain to see if that calms it down.
But it’s possible that the thrust vectoring system latency and/or bandwidth are inadequate to stabilize the airframe in yaw.
We have analyzed many logs and the problem during QRTL is evident and still unsolved.
A fix has been created by a user but has never been integrated and updated to the current master.
But I have never encountered problems from fixed wings to copter if the transition is not automatic but manual, that is, decided by the pilot by changing the flight mode.
The problem occurs only in the case of QRTL, that is, when the transition is also constrained to a height.
It’s not like switching in QLoiter, the code does something else in that condition (wrongly).
In case of a quadplane the problem is not evident because there is no 90° attitude change.
Thanks for you reply Mark, I’ll definitely use the GPS.
Have a good one,
Shef
Interesting Marco, I must have made a wrong assumption in thinking the thrust drop came in between modes Qstabilize and FBWA. Good to hear that it only occurs in the automatic transition of QRTL as I have no use for that mode.
I am designing a tailsitter so I will unfortunately be seeing the change from 0 to 90 degrees.
Hopefully one of the developers can look into the problem that you describe, it’s unfortunate that it is still unsolved.
regards,
Shef
The problem that QRTL you can also not use it manually but in case of failsafe if set it could intervene automatically, for example with the loss of the radio link.
Marco, just trying to understand the issue you are talking about…here is log of a TVBS QLOITER and QRTL transition…
to QLOITER:
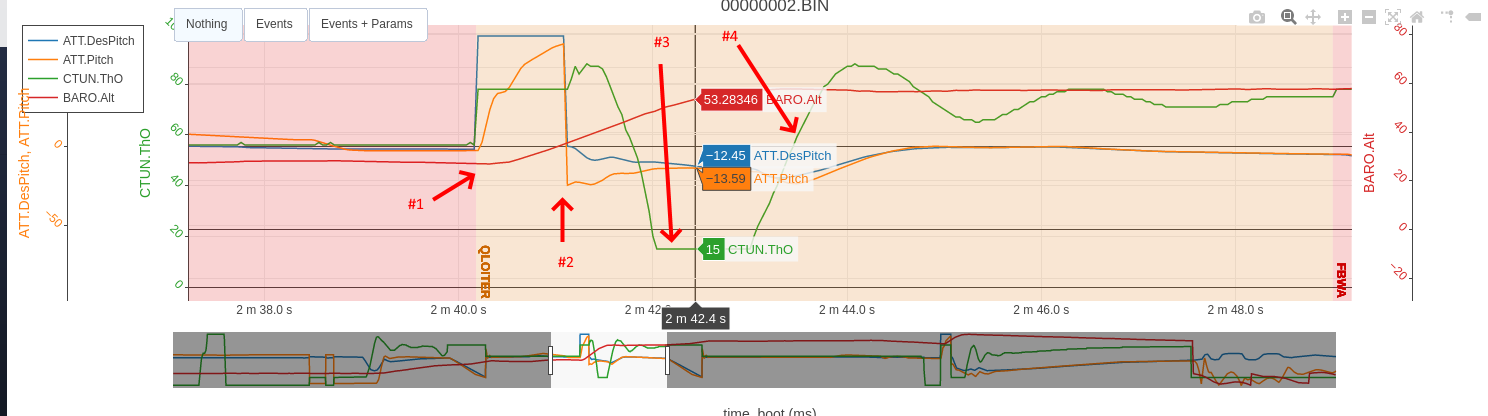
#1 Mode change to QLOITER
#2 Angle wait period over, switch to VTOL control
#3 Throttle drops to min spin as it continues to coast up in altitude…pitch is well controlled so no VTOL motor assistance needed yet
#4 Throttle increases to provide altitude hold for QLOITER at final coasted to altitude
QRTL transition in same flight is almost the same( I even dropped throttle before transition to zero while in FBWA):
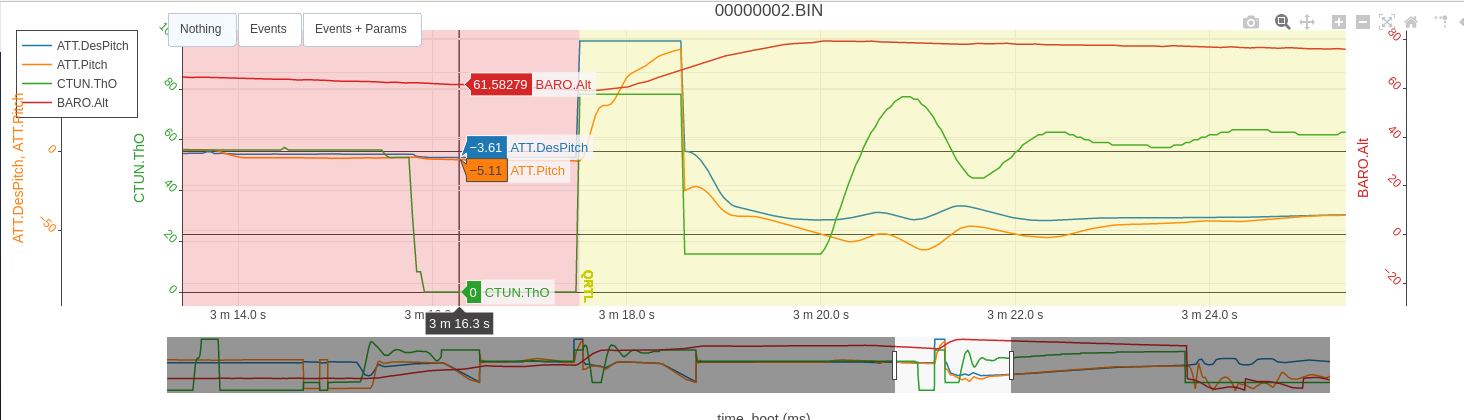
similar behavior…but the throttle drops immediately during the coasting upward, is that the issue?
Yes, is that!
Here is an attempt to fix this problem, on the sim it behaves much better.
The ascent and descent speed has also been separated into two parameters, much better and more logical.
I will study this…you realize the forward transition throttle and attitude has already been changed to use the pilot input at the beginning of the transition to account for the pilot holding position against the wind while hovering/climbing…I added that last year…
will look into improving the back transitions that this impacts…as well as the new params for velocity control…
any objections to me using parts and cleaning it up and submitting as a formal PR if this works?will give him coauthor credit.
I would also split it up into several PR…the speed param changes/additions, and the stabilization during transition
1 Like
Yes Henry, if you can study the code and if you think it is correct do two separate PRs, thanks!
(1/2)
Mark, Tridge,
could you two share a list of parameters one should focus on when when designing excessively heavy dual-motor tailsitters that incorporate internal combustion engines (ICE) (100-500 lbs || 45 - 227 kg)? Assume the only modes of interest right now are Qstabilize and FBWA-start simple.
When designing very heavy tailsitters, it is quite risky to tune it in the same way as RC models as any test flight/hover resulting in a crash would be catastrophic. Vertical hover/stabilize modes could be tuned perhaps with very carefully placed tethers but forward flight would need to work the first time without any major losses of stability or fluttering/oscillating.
I could find no summary and so I’ll start one here with what I know (feel free to call any of these out):
-Thrust Expo should be set to a preferable value, usually higher is better with increasing diameter props
-ACCEL_P/R/Y_MAX should be lowered with increasing weight- want slow smooth changes for heavy vehicles.
-INS_GYRO/ACCEL FILTER should be lower with increasing weight due to increasing vibrations.
-RAT_PIT_FLTD : INS_GYRO_FILTER / 2
RAT_PIT_FLTT : INS_GYRO_FILTER / 2
RAT_RLL_FLTD : INS_GYRO_FILTER / 2
RAT_RLL_FLTT : INS_GYRO_FILTER / 2
RAT_YAW_FLTE : 2
RAT_YAW_FLTT : INS_GYRO_FILTER / 2
-Q_M_THST_HOVER should be set lower than the true value
(2/2)
@iampete please feel free to join in.
in continuing my list of of critical parameters to focus on when designing very heavy dual motor ICE tailsitters (100-500 lbs || 45-226 kg):
-notch filters and vibration dampening : vibrations should be reduced as much as possible in all circumstances but especially when using combustion engines.
-
Q_A_ANG_RLL_P : main parameter for roll stability
-
Q_A_ANG_PIT_P : main parameter for pitch stability
-
Q_A_ANG_YAW_P : main parameter for yaw stability
-
Q_YAW_RATE_MAX : controls how fast you can yaw
this ends my list.
@Shef I’m probably the one with the least experience (none) with large scale UAVs, so I was waiting to see if one of the other devs would answer first. The general approach would be to get Q_HOVER mode tuned up as a fallback mode for testing other modes; if things begin to go wrong, switching to Q_HOVER mode would hopefully allow a safe recovery. Tethered testing of q_hover should be possible to do safely.
Marco, I have played around with the tailsitter transition code for a few days…
- I thought having separate VELZ params excellent and submitted a PR…think that will definitely go in
- After playing around with post transition hover, I cant see that it really improves things…dropped that PR which was in WIP…same with trying to delay alt target until Z VEL is slow…it delays the throttle going to spin_min a bit, but not enough to be important…the real fix is to increase spin_min until the coasting period is over, but that is very difficult since that plays into all the gain-scaling and should not be changed dynamically…if there was some way to run a higher spin_min all the time in the air for alt control modes, but not on the ground, that would be the best solution…don’t have a good approach to that yet
- I have a PR posted to provide a 1 sec wing leveling before pitch up if LEVEL_TRANSITION option is active and that does work to bring the attitude closer to level if VTOL transition starts with a lot of roll and pitch on entry…but I do not think that will go anywhere since it does delay the pitch up…the VTOL transition can be a “bail-out” to avoid obstacles and that scenario requires as fast a transition as possible…
- Adding independent transition timeout and completion angle may be worthwhile, and is easy to do, but with the existing scheme of instant forward transition angle+5deg pitch demand, the transition occurs very fast and is over before the time elapses…and having an independent target may not have any real value…and having a more gradual transition may actually be worse anyway…you dont want to run out of momentum from forward flight getting into VTOL attitude…
thats the current status
1 Like