thanks for the logs. I think it would be best if I taught you a bit about log analysis, do you can look at the effects of tuning yourself. Would you like to do a G+ hangout with shared screen sometime and I’ll show you how to read the logs? Or a skype call?
Hi, I can build almost anything, but not that mystical code magic.
yes, that board looks like next gen, but you have a full plate now .just lookin.
. Just let me know what board you want it for, the pixracer would be great.
I think it would be best if I taught you a bit about log analysis, that might be the hardest i’m an old dog besides you do such a good job. G+? skype? I will read up to start,
thanks!
I’ve built a firmware for pixracer for you here:
http://uav.tridgell.net/RickYonika/plane-vectored-test1-fmuv4.px4
It supports the vectors gains mentioned in my post above. Good luck with it! Make sure you test on the ground in MANUAL mode first, and check the thrust vectoring is going in the right directions.
great , I will swap pixracer to Ilusion tomorrow and…
@tilt, the most interesting thing in your logs isn’t the controller gains, its the fact that the 2nd EK3 instance goes crazy. You were setup to run two copies of the EK3 state estimator (the bit of code that estimates your attitude, position, velocity etc from your sensors), one for the first IMU and one for the 2nd IMU. The second one went very bad. It automatically locked onto using only the first one for your flight which is why it flew OK, but we would like to find out why the 2nd one went bad.
Paul Riseborough (our state estimation guru) thinks its a vibration artefact, but we’d like to know for sure as it could be a bug.
To get to the bottom of this we need to get some flights with different logging parameters. First though we need to fixup your logging so you don’t lose so much data. Right now you are losing a few hundred log messages per second as your microSD card isn’t keeping up. Do you have a better quality microSD card available? You can also raise LOG_FILE_BUFSIZE from the default of 16 to a larger value (eg. 32) to raise the amount of memory used to buffer the logging.
Then we’ll need a “replay” log. Change these parameters:
- LOG_REPLAY=1
- LOG_DISARMED=1
- LOG_FILE_BUFSIZE=32
note that by setting LOG_DISARMED it will log continuously even when disarmed. That means you will end up with really large log files. You may like to set LOG_DISARMED=1 just before you reboot for the flight, then set it back to 0 afterwards.
If the microSD card still isn’t keeping up then you could lower the main loop rate. Change SCHED_LOOP_RATE from 300 down to 200 or even 150. I think it doesn’t need such a fast loop rate to fly this aircraft. That will reduce the amount of data logged a lot.
Cheers, Tridge
@tilt can you also tell me what vibration isolation you are using on the Pixracer? Is it hard mounted, or does it have some foam or similar isolation? Can you send a photo of the mount?
what telemetry interface were you connected over? (wifi? usb?) and what GCS were you using?
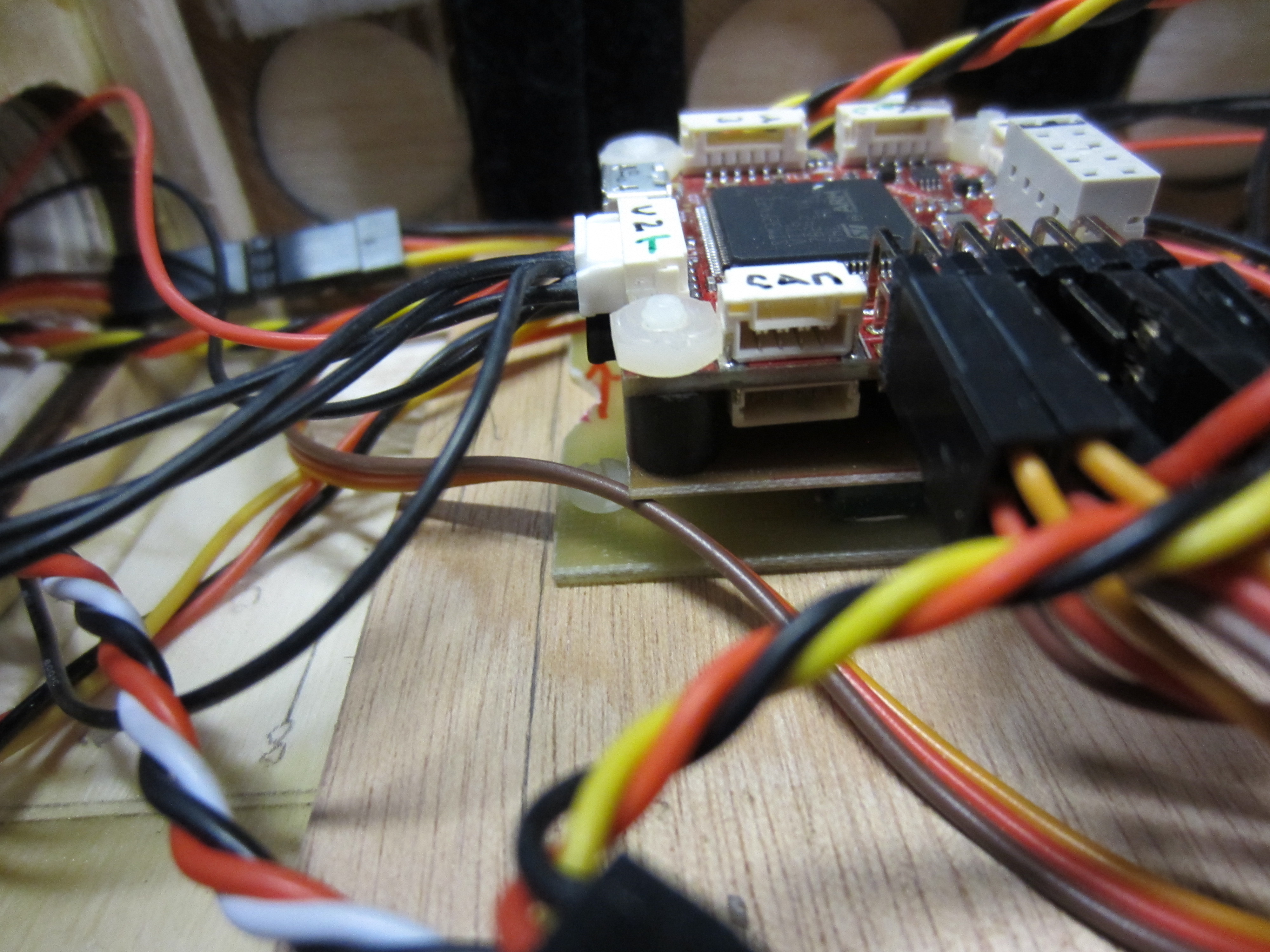

the vibration is probably coming in via the cables.
How much of the area of the pixracer is supported by the vib sheet?
@tilt btw, its quite common to add a bit of mass between the flight board and the vib foam. For example, a square of 4mm aluminium sheet would add some mass which would really help isolation. The pixracer is really too light, you need mass for effective isolation
Do you have a better quality microSD card yes just got some sandisk 32g sd ,do I need to format?
fat32?
yep, fat32. 32G is overkill. I use the 8G SanDisk extreme cards, which are cheap ($7 here) and work really well
I only use the 30ga. silicone in my setups but the new conn are pre made from phil and are ok
How much of the area of the pixracer is supported by the vib sheet? about 1/4 in sq x4 I can add some mass when I swap, no problem
@tilt if you’ve already grabbed that test firmware then download it again. I’ve just updated it so that the elevons and thrust vector servos are active while disarmed. So you can test the Q modes on the ground with the motors off. Should be useful for testing directions are right.
OK excellent ! I will download tomorrow, gives you more time as well, we are 14 hrs diff time zones, Boston
catching up on some old Qs …
no, PTCH2SRV_P is still the primary fixed wing pitch gain. Q_A_RAT_PIT_P is for in hover.
FYI lots of action in Australia on my videos, your ahead of USA at the moment, what going on?
its 1pm here, I’m having fun watching videos of what people have done with the recent code changes
1 Like
just thinking, should we do pixhawk to avoid the pixracer issues?
I am sure I can sqeeze the hawk in if we go with it
I think pixracer is fine. Pixhawk would work too, it would just need a different mount. Vibration isolation is needed for most boards (the pixhawk 2 “cube” can avoid for some airframes it as it has isolation built in)