gives interesting slow flight control
I once tried using control vanes directly behind the props: https://youtu.be/21Gup72SSvQ
but I didn’t feel that they provided enough additional pitch authority to merit the weight and complexity. I guess tilting the whole motor is a big win; congratulations @tilt
I might have to resurrect that airframe and build some tilt mounts.
good try ,I tried same thing with a split canard, I think you will find tilt is worth the effort, can be done with small carbon fiber telescoping tubes , foam board, and servo, or cross the tilt tube over to the opposit aleron. if i can figure out how to upload pics, I will

@kd0aij
Good video. Which motors, Akku are you using, and Weight?
I read somewhere, that Tailsitters needs larger Elevons for Pitch in Hover Mode.
Therefore I made it 55 mm instead of the 40 mm for the Caipirinha Wing.
(Nearly finished, Butter instead of Akku to check the COG, Mots 2212, 1000 kV, Props 9x5, Akku 3000mAh 3S, 850 gr)
See attached Wingtra of the Spinoff of the ETHZ.

1 Like
It certainly won’t hurt, unless you’re trying to fly manually in forward flight. Then it might be very sensitive to your pitch inputs. I just extended the elevons behind the motors on my tailsitter as well, and hopefully I’ll be able to test-fly it today. Pitch authority in a hover and in transition will depend on a lot of factors (C.G. location, center of pressure movement at various angles of attack, prop wash velocity over the control surfaces, ect.) other than elevon chord, but I haven’t read about anyone who has designed a tailsitter with too much pitch authority!
Are you going to add the wingtips to your Caipirinha?
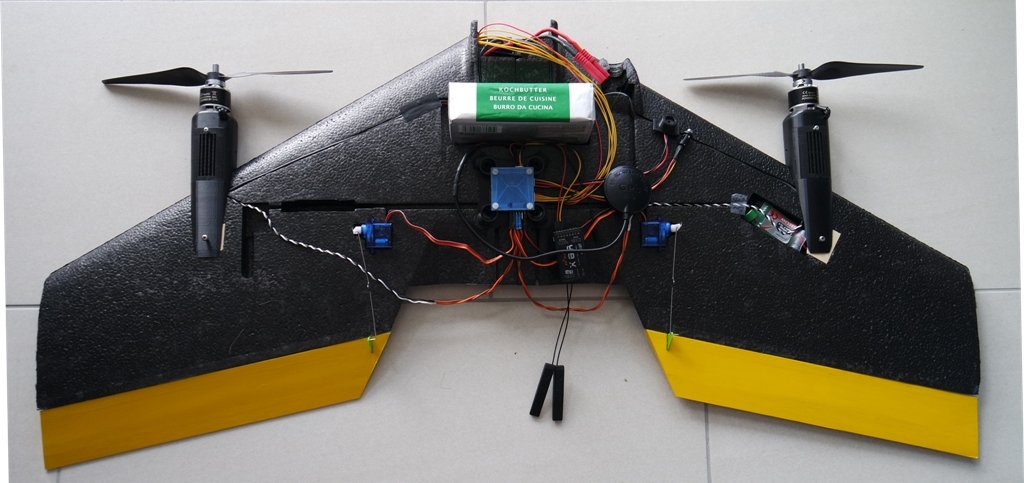
@lorbass My Caipirinha VTOL had Turnigy D2822/17 1100kV motors, 3S/2200mah LiPo and 7x5 props.
Flying weight was about 800g.
I increased elevon chord to 75mm at some point, after removing the canard style control vanes. The Stryker’s elevons are 50mm, the tabs increase the chord to 75mm.
@mrjadkowski
Yes, I will add the wingtips as “landing gear”.
@kd0aij
Thanks for the data.
Ups, my elevons are smaller than 75 mm.
In the video, perfect landing with the canard Caipirinha.
Can you share the Tuning Params like Q_A_RAT…please?
Otto
@lorbass Sorry, but that Caipi tailsitter video is 2 years old and I was running a dev branch of PX4, not ArduPlane. I doubt that the PID settings were equivalent.
My Stryker parameters for ArduPlane will be in the logs I’ve posted e.g. https://drive.google.com/open?id=0Bw3digSMQXDuSUkzVklJV1BwcW8 but your airframe is more similar to that of @mrjadkowski
I burned up a motor on the Stryker after over-propping it, but I have new lower kV motors arriving tomorrow.
Here is a link to my most current configuration backup file:
I did some more flying today, and the hover control authority with the larger elevons was excellent. I did a forward flight hand launch in AUTOTUNE to try to get the forward flight tuning done, with mixed success. The airplane was flying generally OK, but it has a tendency to yaw to one side in forward flight. I could make pretty good turns to the right (in the direction of the yaw), but trying to turn to the left resulted in more of a sideslip. I’m guessing that I’m getting more thrust from one motor than the other, but I haven’t dug into the logs yet to figure out why. I attempted a back transition into a hover to land, which wasn’t successful. I suspect that the extra pitch authority on the elevons, along with the constant yaw, caused it to snap roll as it pitched up into a hover attitude. I’m pretty amazed how durable this Skywalker has been. Other than my little carbon landing gear leg, a bunch of props, and (on this crash) the control horns, I haven’t seen a whole lot of damage!
@mrjadkowski
I analysed your Params of the link.
There is no Parameter RUDD_DT_GAIN. May be you used not the latest Firmware from
here: http://firmware.eu.ardupilot.org/Plane/latest/PX4/
Version 3.8.0beta4 does not support it. And I had to go to the FW of April 9th.
Sorry, that is the parameter backup I made before I did the firmware update. I set my RUDD_DT_GAIN to 0. After looking at my logs for the previous flight, I think my ESCs may have been calibrated with slightly different values. I noticed that in a hover, the flight controller was giving the right motor slightly more throttle signal to keep the airplane level. In AUTOTUNE mode in forward flight, the two signals were matched, and I was seeing right yaw, which I would expect if the left motor was producing more power than the right for the same throttle signal. I recalibrated my ESCs and as far as I can tell both motors are running at the same RPM. Hopefully that takes care of my yaw problem so I can get the tuning done and move on to transition testing.
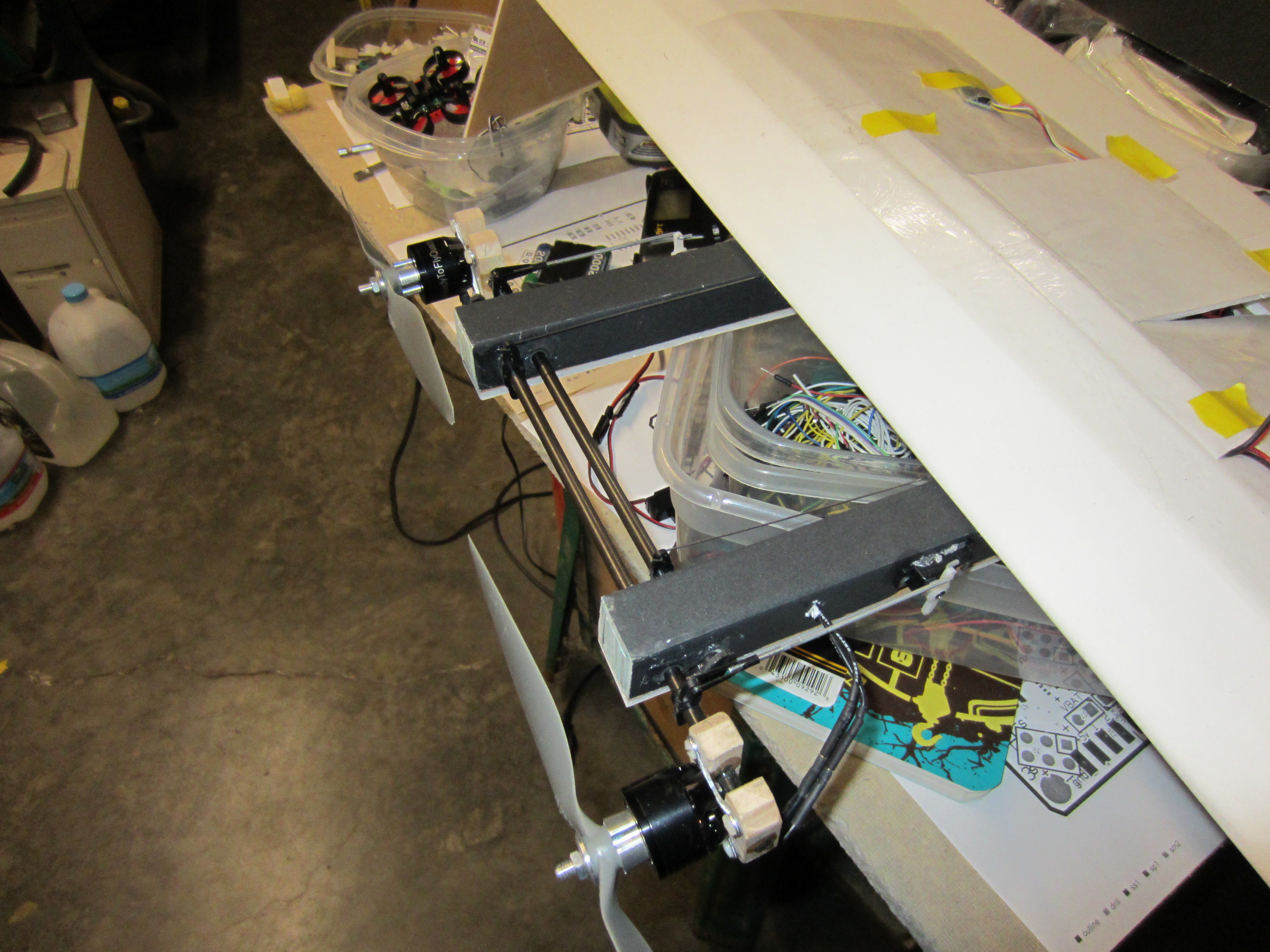
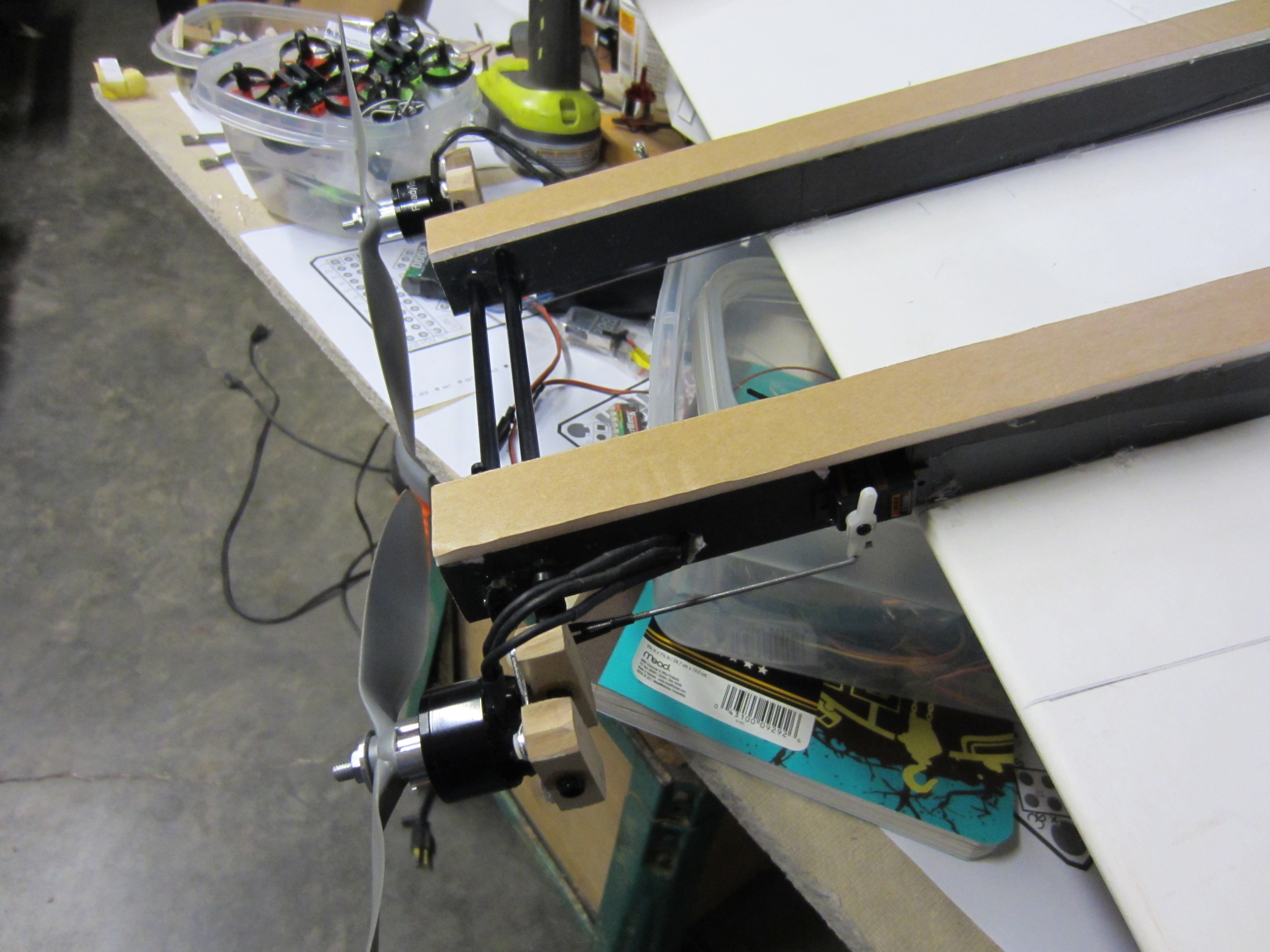
, Hi, Tridge and fellow avation pioneers, got gray to fly in hover, it’s going to be great,
my comparison on hover, pitch needs 90 deg+ to counter wind, way to quick on roll,
yaw could be a little faster. got some roll oscillations, but overall I am very impressed
"yonika" system, unlimited pitch in hover, I think tilt allows that.
transition switches control to mode2 airplane I think quad flying and airplane flying are inbeded in me and very dificult for me to fly, one the other way. Can that be in firmware?
or in the transmitter the only way?
posted video on youtube
@tilt Congrats, that’s looking pretty good already. Do you stop the motors after landing by switching to FBWA mode? The default delay is 10 seconds in Q-modes and it was obviously faster than that.
excellent! For those who missed it, video is here:

Did you just configure the motor tilts as elevons, or did you mod the code to do vectoring separately?
Can you put the DF log somewhere so I can take a look? Get it from the SD card, or download it over MAVLink with MissionPlanner.
yes, looks like the differential thrust gains are a bit high. The logs will show the contributions to that from P, I, D and FF (in the PIQR log message, which logs roll PID elements in hover). From that you can probably work out what to change to fix it.
yes, transition will be automatic, just change to FBWA mode.
I should have a first cut at support for vectoring in the code done soon. I’ve built a model in FlightAxis, so I have something to test now.
Welcome to ArduPilot!
. Do you stop the motors after landing by switching to FBWA mode?
switch to manual mode , did you mod the code to do vectoring separately? no just split the signal
Can you put the DF log somewhere so I can take a look? yes I will send via google
yes, transition will be automatic, just change to FBWA mode. that’s perfect
pitch needs 90 deg+ to counter wind, doable?
thanks
Tridge, logs on the way, google drive
also if you get a chance take a look at paparazzi chimera controller
I would like to build, then modify for our use ?
I’ve created a pull request that adds support for vectored tailsitters:
The way it works is very simple. The plan is to add complexity after we have initial results.
To use it, you need to do the following:
- set SERVOn_FUNCTION to 75 for the left motor tilt servo.
- set SERVOn_FUNCTION to 76 for the right motor tilt servo
- set Q_TAILSIT_VFGAIN to the forward flight thrust vectoring gain
- set Q_TAILSIT_VHGAIN for the hover thrust vectoring gain
You also need to set the REVERSED, TRIM, MIN and MAX of the two motor tilt servos appropriately. The trim should be set for the motors to be pointed straight forward.
You can also control the relative gain of the elevon mixing with the MIXING_GAIN parameter. So if you set MIXING_GAIN=0 then your elevons will never move and you will be flying purely as a thrust vectored aircraft (in both fixed wing and hover). If you set MIXING_GAIN non-zero then it will combine elevons and thrust vectoring.
I have tested it in the FlightAxis simulator flying it with pure thrust vectoring (setting MIXING_GAIN=0) and with both thrust vectoring and elevons with various gains. It flies nicely in the simulator!
I must say though, flying in fixed wing modes with only thrust vectoring (with MIXING_GAIN=0) is interesting. Landing is hard, as when you drop the throttle to land you lose all control authority. So you have to land fast!
It’s much easier to fly when you combine both elevon and vectored control.
I found the following parameters worked well in the simulator, with the left motor tilt on channel 3 and right motor tilt on channel 4. I’ve setup the tilt servo throws so that 2000 is 90 degrees up, 1000 is 90 degrees down and 1500 is straight forward. - MIXING_GAIN=0.5
- SERVO3_FUNCTION=75
- SERVO3_MIN=1000
- SERVO3_MAX=2000
- SERVO3_TRIM=1500
- SERVO4_FUNCTION=76
- SERVO4_MIN=1000
- SERVO4_MAX=2000
- SERVO4_TRIM=1500
- Q_TAILSIT_VFGAIN=0.2
- Q_TAILSIT_VHGAIN=0.3
- Q_A_ACCEL_P_MAX=40000
the reason for setting Q_A_ACCEL_P_MAX a bit lower than the default is to smooth out fixed wing to hover transitions, preventing it pulling up the nose too quickly.
I’ve tested QHOVER, QSTABILIZE, FBWA, LOITER, QLOITER, takeoff in QHOVER, takeoff in FBWA and transitions between all the modes. It flies nicely.
1 Like
@tilt, I don’t know if you’re setup to build the ArduPilot firmware from a PR yet. If not, let me know and I’ll do a build for you of the vectored thrust PR. Just let me know what board you want it for.
thanks!
I see this: Chimera/v1.00 - PaparazziUAV
is that what you mean? Looks like different hardware. We can add new boards, but its quite a lot of work.