this has been fixed now
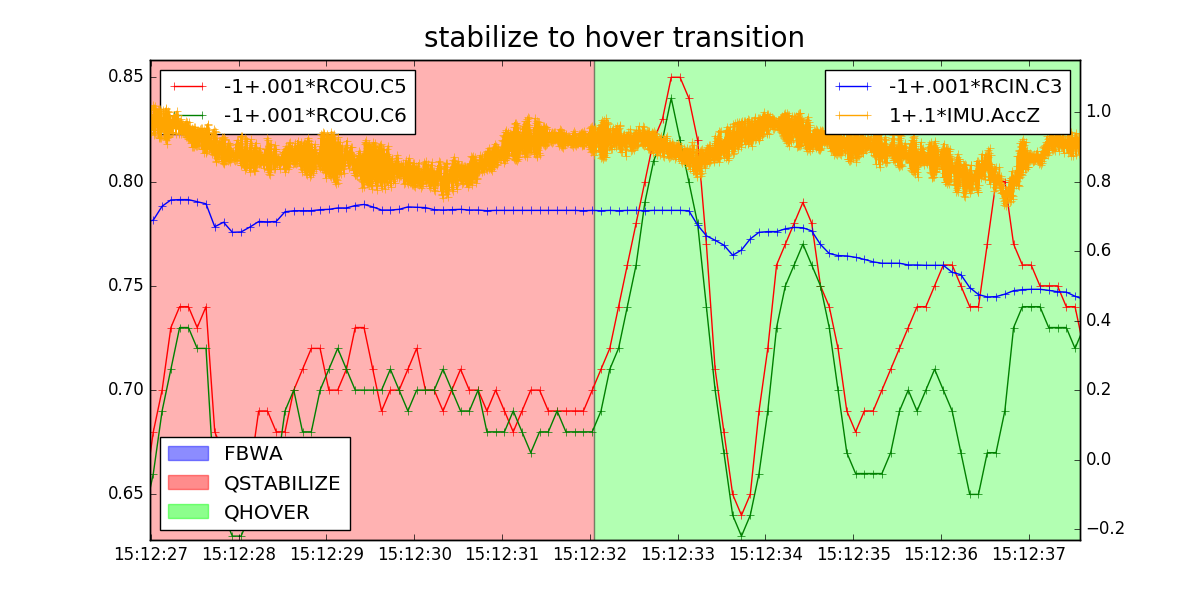
@tridge I flight tested the stabilize to hover transition on my last flight (the one that ended with a burned-out motor) and it was smooth: https://drive.google.com/open?id=0Bw3digSMQXDuUlYyR092OThPU00
1 Like
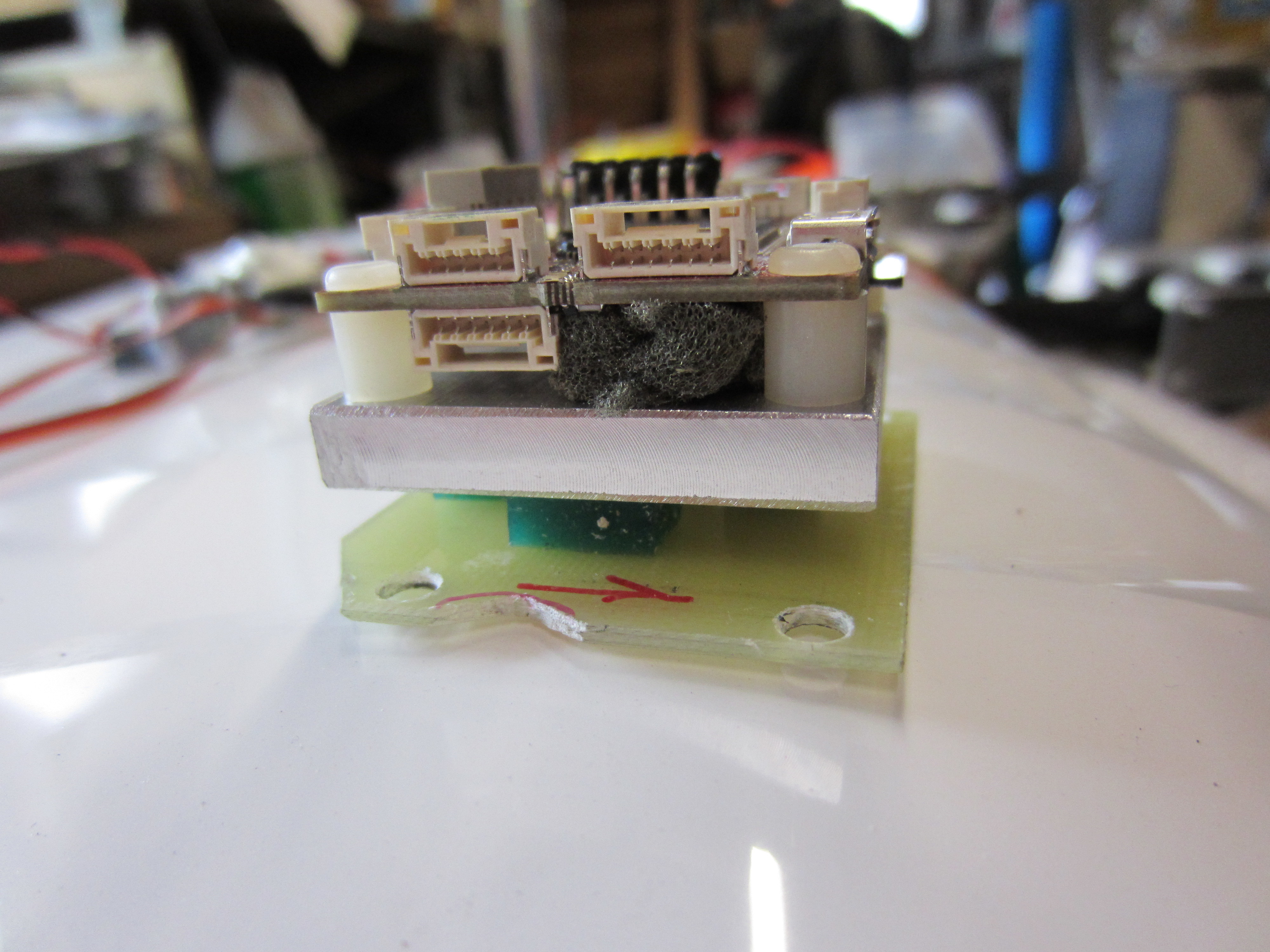
the additional mass looks great. Any reason why you have 3 cubes of the zeal instead of 4? I could imaging that may oscillate a bit with 3? You could judge it a lot better than me though, so if it feels OK then ignore me.
@tilt also, is that steel wool under the flight board?
no foam,air filter [quote=“tridge, post:210, topic:15302”]
Any reason why you have 3 cubes of the zeal instead of 4?
[/quote]
there are 4 just opposit corners keeps me away from the green goo
ahh, makes sense.
I’m really looking forward to you trying the new code with thrust vectoring support!
me to! the system says I talk to much.
it tells me that too, I ignore it ![]()
1 Like
OK, want pic of motor mt, for friends build
Hi, Tridge
starting to work the control system, tilt must be active when not armed, props will dig holes
only getting 20 deg tilt how to add tilt deg.w/o elevons? tilt servos are set to 180 deg.
mixing is all messed up, should I sort wbwa 1st then hover 2nd than manual 3rd ?
sorted controls 
@tridge Hover tuning the Stryker with the new motors: was initially unstable in qstabilize on roll axis, then encountered oscillations due to coupling between pitch and yaw. Logfile: https://drive.google.com/open?id=0Bw3digSMQXDuMU8yc192VVdwZTg
Also, flight mode background color seems to be wrong in MAVExplorer; qstabilize is labeled fbwa
I notice you didn’t have GPS lock. At the moment that means it will be using DCM, not EKF. I think we need to change that. That log is mostly FBWA mode, with just 12 seconds of QHOVER, and I see large discrepencies between attitude estimation between EKF and DCM for that time. I don’t think you necessarily have a tuning problem, I think the most obvious issue is in state estimation.
There are probably tuning issues too, but if attitude estimation is off you can’t tune.
Just a note to everyone that I’ve pushed the changes for vectored thrust support to master. These changes also mean that the ESC outputs for tailsitters now run at Q_RC_SPEED (default 400Hz). They were at 50Hz previously.
@tridge That last flight was on latest master, so it should have had 400Hz ESC outputs, and mavproxy claimed I was in qstabilize and qhover mode, not fbwa. Is is it possible to hover in FBWA mode? The motors were spinning when armed, which is not the case in FBWA. I did at least 6 takeoffs and upright landings in that log.
I"ll have to pay closer attention to system status. I don’t know why there was no GPS lock; maybe the cable is damaged. Will have to get the pre-arm checks working properly; do they require just a 3D fix, or are there also constraints on hdop/vdop as in PX4?
there are quite a few constraints, and not just on hdop. See this function:
First Takeoff ended as Flip vorward. (No transition in low level:slight_smile:)
After analysing Log and video I think it was my fault.
Due to verry slow (carefully) increasing throttle the Tailsitter tilted forward, the elevons couldn’t not correct it, because the landing gear out of the winglet (2mm carbon) where stuck to the ground.(good to see in the pic)
And then immediatly increasing the throttle was to late probably not enoughe power to lift with this angle.
Video: https://www.youtube.com/watch?v=-l7qmgBgiQc&feature=em-upload_owner
Frame OK, Props damaged.
So, the conclusion: Full power for the takeoff.
Or other advice?

@lorbass Yes, takeoff is a bit difficult with this kind of tailsitter. I throttle up slowly till I’m sure the motors will respond quickly, then do a jump takeoff by (nearly) firewalling the throttle. You definitely want to clear the ground quickly with a lot of thrust for elevon control. Also don’t back off the throttle too far after you get airborn, try to avoid quick descents until it’s tuned well.
I did something similar with the “landing gear”, but used pivoting legs to avoid breakage during horizontal landings: https://goo.gl/photos/aLYKJQJtRoqs9sGs9
@tridge I think my mode changes weren’t getting logged reliably. Seems there are a lot of dropouts around mode changes: https://drive.google.com/open?id=0Bw3digSMQXDuaGVBZkVReklpNjQ
I always arm in QSTABILIZE mode, then switch to FBWA to disarm. The 10 second disarm delay is quite inconvenient during testing.