I’ve been continuing to test RealFlight8 models for @lorbass. He is building a model of his caipirinha TVBS. I’ve created a separate discussion topic for it so everyone can follow along if they want to, or get involved with building a model
https://discuss.ardupilot.org/t/building-realflight8-models/23106
Has anyone ever testet TVBS with ONLY TV and no control surfaces? I wonder how this would fly.
Maybe someone is willing to do some tests with disabled ailevons? Would do it myself, but I don’t have vectoring.
I tried it in RealFlight and it flies fine at high speed, but if you slow down too much in fixed wing then things go very badly, as you lose control completely.
Hello sir, good experience, I also experienced loss of control at lowering throttle for vertical land, and loss control in windy conditions.
Can you please take flight test by increasing controling surface and please share your results.
Hi,
thanks for all the hard work guys,
Is there a post or wiki with all the relevant up to date info on vectored bellysitter setup?
Nearly 800 posts of info is a whole lot to parse through.
I have successfully hovered my plane, however the throttle response was very low in the belly land position, if I stand up the sitter I have enough thrust to hover. Edit: Found post about Q_A_ANGLE_BOOST
What am I missing to get mine to transition from belly down to tail down takeoff?
Also, what is everyone using for log overlays? Dashware?
Thanks
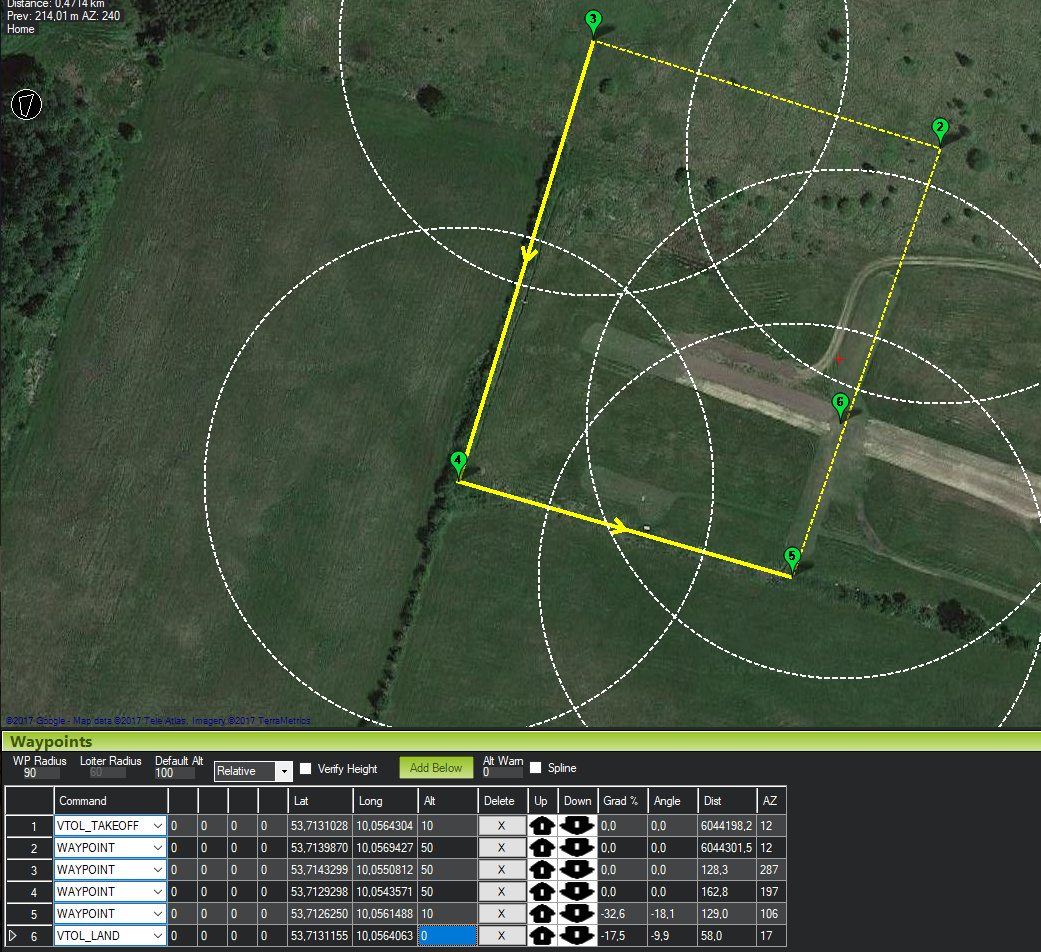
Hi all. Today I went flying with my tailsitter to test an auto mission:
- Takeoff in VTOL to 10m
- Transition and climb to 50m
- some waypoints at 50m
- Waypoint at 10m
- Backtransition + land
Just before I did an endurance test which went absoluty fine.
This is what happend now:
Seems as if it wanted to fly knife egde… Have not taken over controll till about 0:40 (!!!)
I put it on the ground and it was fully initialized. I switched to QStabi and armed, then put in Auto mode.
After this wired flying happend i first switched into FBWA with full thr, but wasnt changing anything. Then i switched to QStabi and it was able to get in controll again. Then switched to FBWA again which went fine with transition. Flying towards myself with backtransition and landing safely.
WTF happend here?? Sadly the log seems to be corrupted. But here anyway: https://www.dropbox.com/s/cpylmcumce36ckm/00000012.BIN?dl=0
This is the log from the test before with no problems. I only adjusted FBW PIDs while flight a tiny bit, so they might not be in the log correct. Everything else is same both flights. https://www.dropbox.com/s/us41wtcvpmixcbd/00000011.BIN?dl=0
I have absolutely no explanation for this.
[quote=“palm369, post:802, topic:15302”]
WTF happened here??
[/quote]wow, nice recovery…something break loose?controller /servo/???
No nothing. Plane is absolutly fine.
Yes, I’m modifying the control surfaces. Will let you know after testing. Did your airframe be able to recover itself from control lost ?
unfortunately that log is completely empty. No msgs at all.
Do you have a tlog from a ground station for this flight?
that log actually shows some quite severe control problems, plus quite bad vibration. It oscillated over about 20 degrees in pitch while in LOITER mode, plus the vibration was enough that the DCM attitude estimate differed from the EKF estimate by about 30 degrees at times.
I’d suggest adding more vibration isolation (and mass) to the flight board, and then doing an AUTOTUNE of the fixed wing tuning parameters.
I suspect the bad flight is just a worse example of the same sort of issues.
Cheers, Tridge
I had my android phone connected via QGC, but there is no file I can find on it.
Yeah on the beginning of the flight I had bad ozzilations in pitch. Then I adjusted the pids a bit (higher d) and the were not visible anymore from gnd.
The PIDs I used are results from Autotune though. Seems not to work well on my plane, because it its aerodynamically unstable. (CG is very far back)
In FBWA its flying Ok.
Just noticed that this log is faulty also, I was flying 17 min, but log stoped more early.
[quote=“tridge, post:806, topic:15302”]
plus the vibration was enough that the DCM attitude estimate differed from the EKF estimate by about 30 degrees at times
[/quote] Whats DCM? Which params do you compare here?
Might be. I will repeat this test.
Did you check AUTO in SITL?
Also it would be awesome if we find a way to restore my PIDs for hover. Before your patch they were perfect.
I think I calculated them at full throttle (100%). So now my hover thr is at about 0.7 (70%)
100/70= 0.7
So I calculate my PIDs: “New = old * 0.7”, right?
Are all (P + I + D) scaled like this? Whats with FF?
I enjoy watching your videos as I lurk on this thread. Two questions: 1) what is the incremental weight (in grams, or % of AUW) of the tilt hardware relative to a non-VTOL, fixed motor version of the same wing? 2) I can tell on landing, but do the motors tilt skyward as the wing flops to belly? Or do you simply cut the motors as soon as you have wingtips on the deck, and belly slightly inclined toward resting position.
Sorry if the answers to these questions are obvious to those following this interesting thread more closely.
Kelly
Did this for PIDs for all axis. Looking better now.
Sir,
This is my updated reply for you and readers.
I just understand how CG is very important specifically for non vectored tailsitter through some successful and non successful test flight on YouTube.
Normally CG of flying wing is aprox 20% but this non vectored tailsitter require large CG, I think require close to Natural point.
Low CG increase weight in bottom side, therefore airframe tilt in hower and sleep in air and loss of control.
I tried yesterday with large control surface, but results was uncontrollab, CG was only 13%.
My 4ft wingspan frame which is made from my crashed 6ft wingspan flying wing. So built is not so perfect.

Sir I am waiting for your test result soon. . . . . Please.
Hey Tridge and everyone else. Thanks for starting this thread and posting the information. I’ve just started building a dual motor tail sitter, so I’ve found the information in this thread valuable. I started my first fixed wing VTOL 3 or so years ago, a wing/tricopter mashup, only to discover that there was very little support for transitioning, so I was really excited to see how far things have progressed. Cheers! -David
Hi Kelly ( @wkf94025 )
The weight of a small digital 180 ° servo with cables and some wood (we did not measure)
Yes, they do
Regards Rolf
Thanks Rolf. Are there any photos or a build log of your aircraft, or a similar build? I am curious about the build details of the tilt mechanisms. With 800+ posts in this thread, serial search is somewhat daunting.
Kelly
hi
i have q
… how to make airspeed senser off in qgraoundcontrol as a pixhawk tailsitter mode
Like this
And here the manual.
Manual Tilt motor carrier.pdf (571.6 KB)
The servo weight 12.5 gr.
Regards, Otto