Your Q_M_PWM_MIN and Q_M_PWM_MAX did not come across in the param conversion. They should have. If you have a 4.1 param set I can work out they should be.
Thanks for your quick answer.
I’ve just checked they are 0, but also with the 4.1.7 Version without negativ effect.
Vor Upgrade auf 4.2.1.param (20.6 KB)
Also FW 3.9.8, both are Zero and the mots worked.
May be with 4.2.1 this Params are activ now.
4.1 has two params for the same thing. Q_M_PWM_MIN, Q_M_PWM_MAX and Q_THR_MIN_PWM, Q_THR_MAX_PWM
Your Q_THR_MIN_PWM and Q_THR_MAX_PWM are 1000 and 2000. So on 4.2 Q_M_PWM_MIN and Q_M_PWM_MAX should be 1000 and 2000. It is supposed to convert automatically so we must have a bug somewhere.
Great, now the mots are controlled.
Thank you for helping. One bug found is one less.
By the way.
The Param Q_M_THST_HOVER is definded as the Thrust to Hover.
Therefore it was with FW 3.9.8 at 0.65 (Autolearn and safe on) This was correct and to see in in the Log AETR_Thr.
For VW 4.1.7 it was converted to about the half value. Correcting manually it to the “correct” Value
produced a crazy Dance on QHOVER. Back to the converted Value 0.32 the behaviour was good again. But 0.32 correspond not with the Thrust to Hover. Another bug?
there are two log values for Throttle…CTUN.ThO and QTUN.ThO…for FW and VTOL modes, respectively…the Q_M_THST_HOVER value is based off the QTUN.ThO which is a “thrust” value into the VTOL motors library…so at the same PWM to the motors, those two values would be different…confusing I know…but a legacy of switching control from the FW throttle controller to the Copter motors controller as the mode switches from FW to VTOL
Thanks for explication. I see, with QTUN.Tho it corespond.
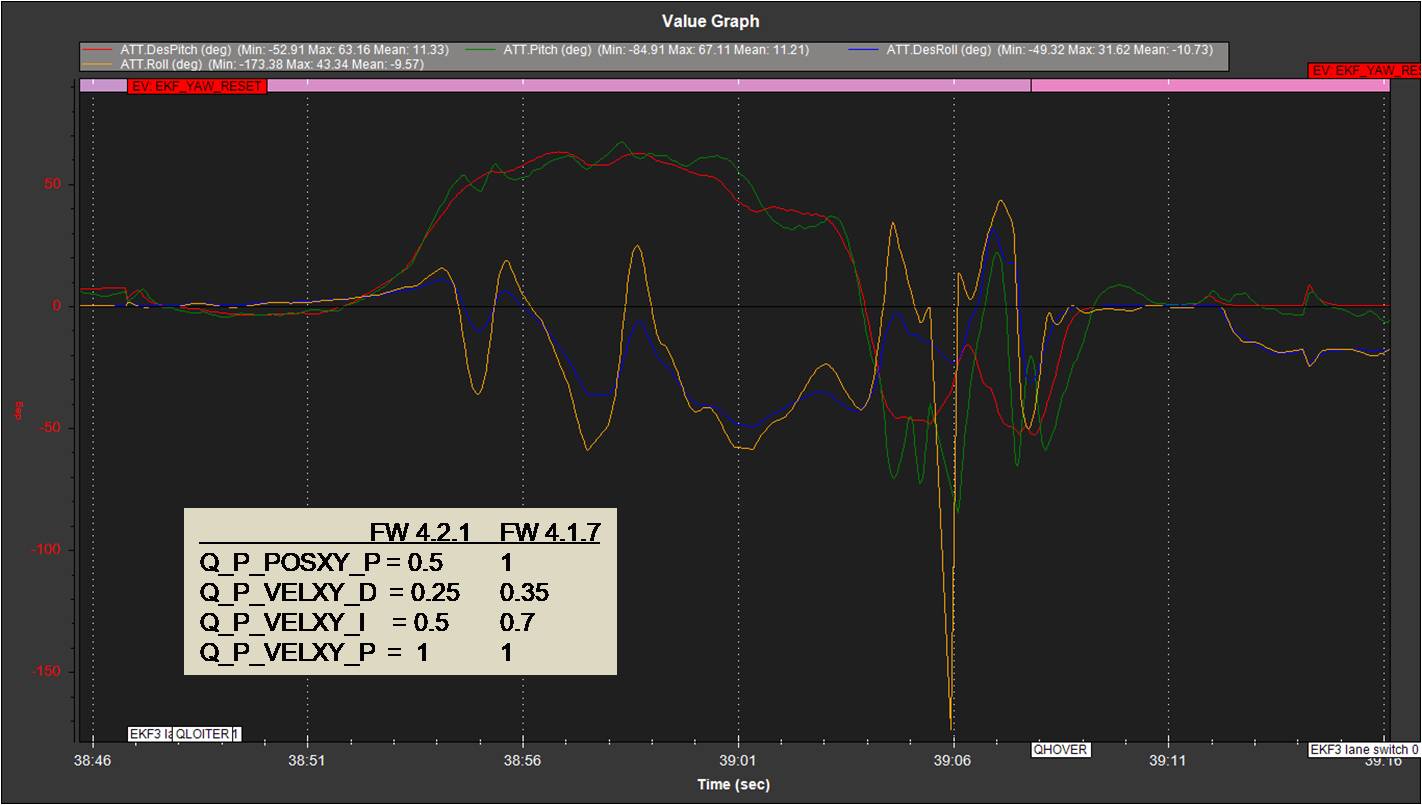
@iampete, Now in the air again with 4.2.1 and reduced Q_P_… Values but still oscillating in QLOITER
Which Params in the Log shows P,I,D Values like for Copter Mode PIQP or PIQR in order to analize the reason?
Or can you recommend how to tune the Values for Q_P_…?
Less, but still a lot of Messages about lane switching and others. Velocity variance is
not to find in the Log but was reported via Telemetry. Calming after some time in Mode Cruise. Test interrupted due to rain.
Log: https://drive.google.com/file/d/118XD_JZOK1I-FMKbWkbebGd10CeAUAdk/view?usp=sharing
@iampete , @losawing Here the Video of the strange QLOITER behaviour and the Errorreporting Storry
of above poste. 11 SAT’s, Hdop 0.8
https://drive.google.com/file/d/11AK4gyPF3RZF1I6QeNl35o9CFLc-x_L_/view?usp=sharing
What means Velocity variance in Mode QHOVER?
@lorbass
My small non vectored tailsitter fly very very well in qloiter mode with plane 4.2. I have from time to time the switch lane message or the EKF yaw reset message without change in attitude or stability. But I never get the velocity variance message which seems to be a serious warning. Could it be due to a bad sensor measure ? that would in turn cause the other messages. Did you looked at sensor input ? Did you get same warning with plane 4.0 ? did you recently modify the hardware or change power line position ? bad vibrations ?
With 3.9.8 and 4.1.7 I never had this velocity warning. No changes in Hardware, Airspeed Sensor
calibrated (covered) before start. But (hopefully) not used for hovering.
May be this meant vertical velocity? This message is not in the log to read, but to hear via Telemetry.
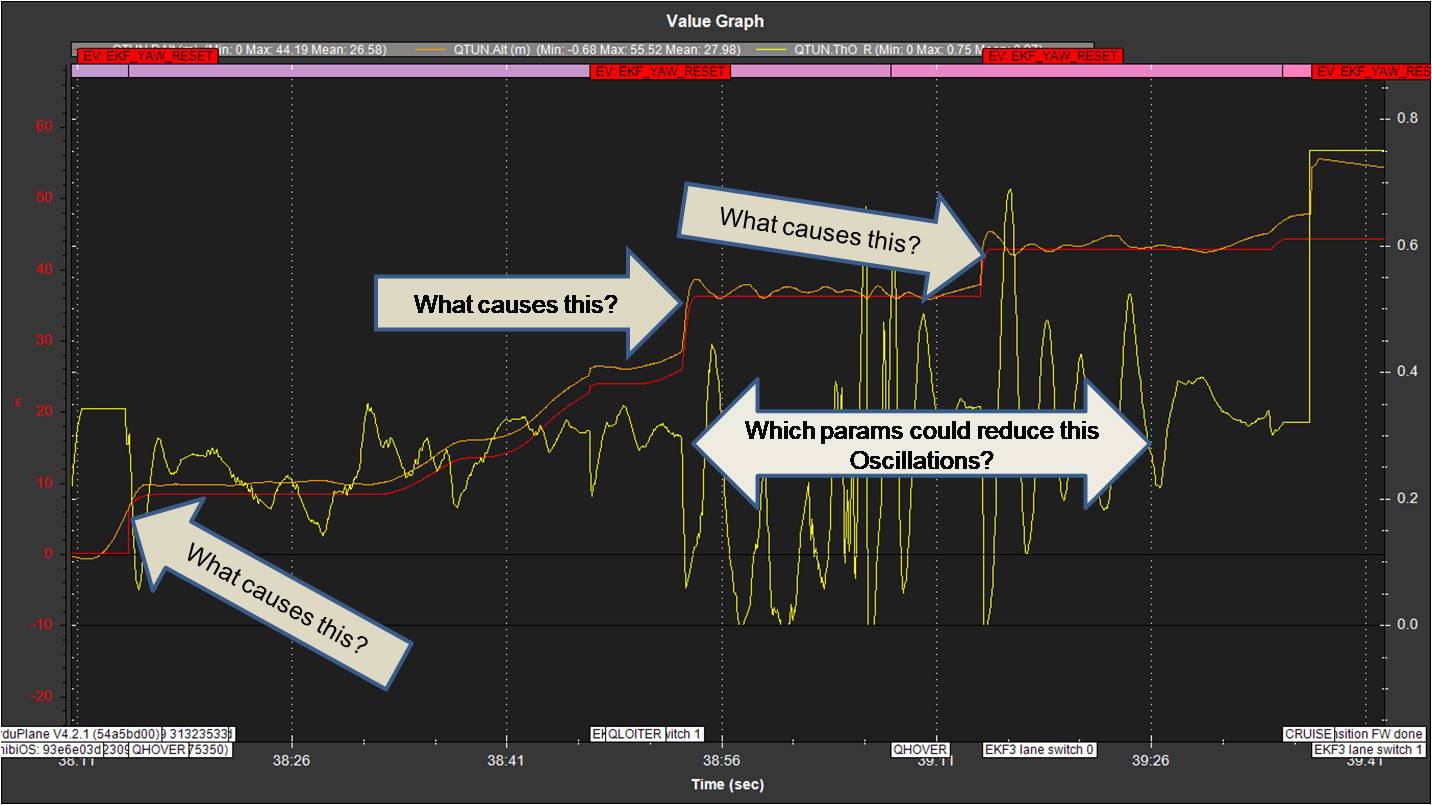
But I discovered a strange situation when changing the Modes from Stabilize-QHover-QLoiter.
Every time I see a Yaw Reset and a heavy increase of QTUNE.DAlt, QTUNE.Alt producing
Oscilations in QTUNE.Tho. Beginning with QLOITER and following back to QHOVER
@iampete Sorry, link to the Log was not public. Here the public link to Test17.bin
https://drive.google.com/file/d/118XD_JZOK1I-FMKbWkbebGd10CeAUAdk/view?usp=sharing
Those Altitude jumps are the EKF lane switches. Throttle oscillation is the Z controller search Q_P*Z in Mission Planner. I would half Q_P_POSZ_P and Q_P_VELZ_P.
The EKF issue looks to be caused by compass interference.
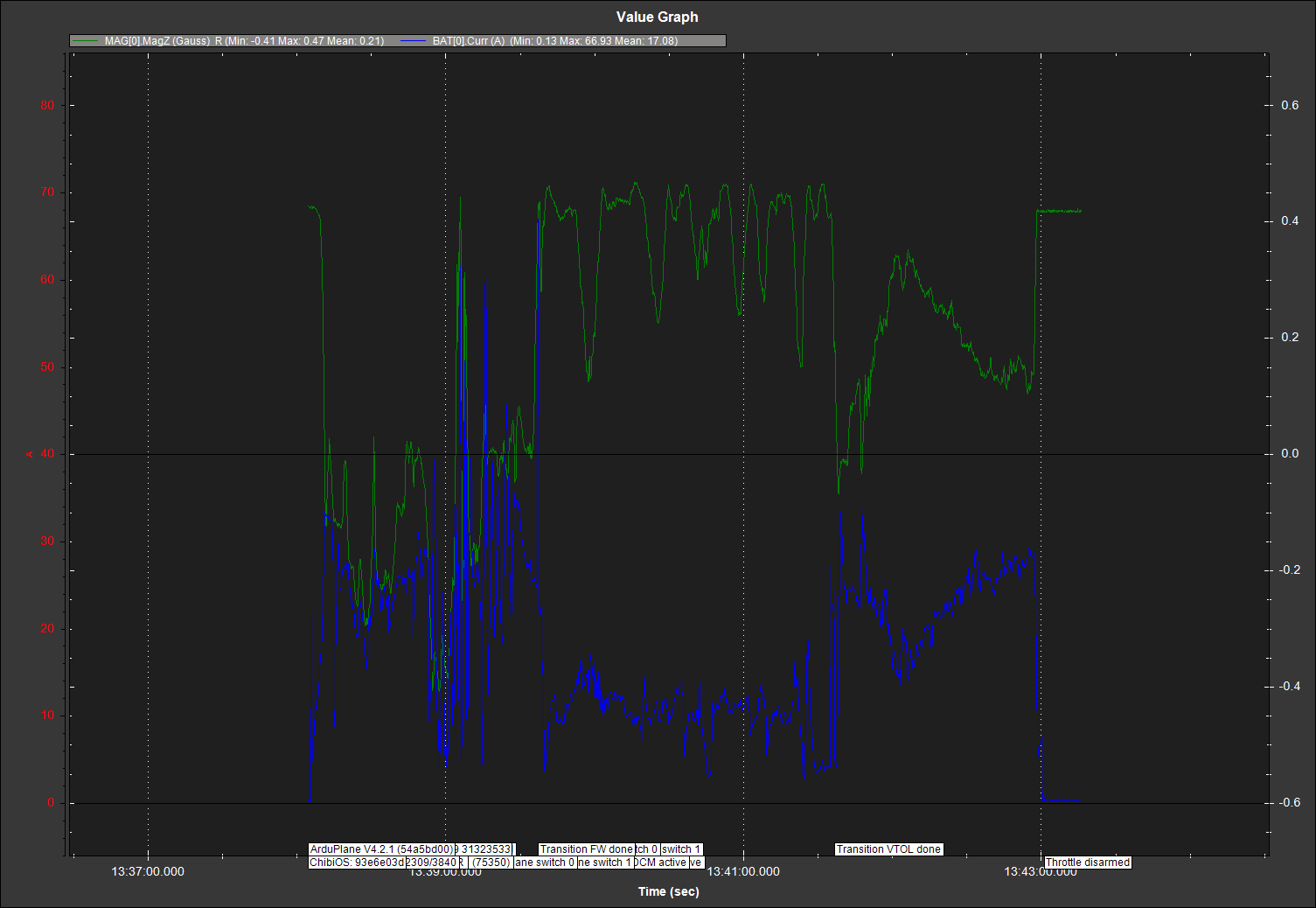
You have a current sensor, so you should be able to get good magfit results, that is the first thing to try.
https://ardupilot.org/plane/docs/common-magfit.html#using-mavexplorer-s-integrated-magfit-utility
Thanks for helping. Will study the link and continue to tame the beast.
Whyle calibrating the compasses in the field, I heard again the message: velocity varience.
I use one GPS and one Airflow Speedsensor. Are they competing while calibrating or copter modes?
You may have read, I fight with QLOITER.
I found your explication about FF. This Param I did not understand and so neglected it so far.
In earlier Tests with 4.1.7, I made maneuvers with hard movement in Roll and Pitch. But there was no
Param PIQx.Act to find. Does your recommended procedure to tune also work for a Dual Mot Belly Sitter? If so, I will repeat it and calculate FF.
If I understood this looks like: (P+I+D)/Act = FF ?
the logging of PIQx.Act has been around for a long time…its not missing in 4.1.7…and its not a param, its a logged value of the actual obtained response to the PIDs…
no…on a FF dominated axis (pitch/yaw on a TVBS)…make the plot of PIDx.ACT * X equal the plot PIDx.P+PIDx.D+PIDx.FF …I is a long term offset that does not affect short term control actions…X will then be the new, and correct FF value for Q_A_RAT_X_FF and for Q_A_RAT_X_I since I should equal FF for FF dominated axes…then you can proceed to tune D and then P for the axis…
see Tailsitter VTOL Tuning — Plane documentation …but I just fixed a typo in a formula on that page, so wait until later tonight or tomorrow to read it…
1 Like
Sorry, I meant 3.9.8 where I made the Hover Tests.
Therefore I must repeat the sharp Maneuvers to get the log data.
Thanks for the link, since I started with VTOL’s after the Call of Tridge, in March 17, the Wiki has improved a lot. So I see, I need some refresh lessons ![]()
But amacingly QHOVER works perfect for Start, Landing in Wind, forward flight with 65° Pitch and for Transitions even ignored the important Param FF (0) for Pitch and Yaw.
HI Lorbass,
I have a issue with the dual motor tail sitter model that I recently built.
As soon as I arm the tail sitter, the right elevon is actuated and moving to the extreme position and the tail sitter is rolling towards left after takeoff. I don’t get why it is happening.
Can you please have a look at the flight data and parameter list in the link mentioned and help me to fix the issue.
https://drive.google.com/drive/folders/1iB4ij1NStocdhe8ByCpQmBrIv_SMBhA_
Hello Henry, I made now Testflights to work with your info to get the Param FF.
There are different Infos about the Formula in your poste compared with the Wiki:
https://ardupilot.org/plane/docs/tailsitter-tuning-guide.html
PIQP.FF+PIQP.P+PIQP.D
X * (PIQP.Act) , where X is 0.2 to start
In your post PIQP.FF is not in the sum.
Which one is right?
The wiki is correct…
Thanks but too late now.
@iampete
@losawing Your info was correct, QLOITER in a vectored Tailsitter does not work with FW 4.2.1.
First a message EKF3. lane switch 1, then starts to shake and final loose control.
Was not to hold with switching back to QHOVER. And not high enoughe to save with Plane Mode.
Video: https://youtu.be/szaH8CMBIVU
Log: https://drive.google.com/file/d/11IJQe9AOzNYETziU5WCY8x5S3sjofxMb/view?usp=sharing
May be, someone find the bug, but for the wing it was the final crash. (7.8 g)