looks like a bit larger version of one of mine: C1 Chaser TVBS conversion
doing a comparison of the Q_ params might give you some insight…if you use the “latest” ArduPlane firmware there are some new params like Q_TILT_ENABLE and Q_TAILSIT_ENABLE that need to be set to 1 since they now hide the tilt and tailsit parameter tree…
1 Like
Awesome! Perfect, yes I see that some are hide and I need to set 1 both and then reboot to be available that extended parameter tree, I’ll let you know my advances to everyone! 
Thanks a lot!
Hi Alejandro,
I appreciate you model 
Can you please share/precise de model of
- the servos tilt
- servos elevons
- esc
- motors
- prop
- batt
Thanks
1 Like
Hello @melc, thanks!
Yes, for sure.
- Motor: SunnySky 4006V 740KV – KDE 3510XF 715KV
- ESC: Hobby Wing 40A w/o BEC
- Servos: 2x Slim Digital Servo Hitec 125MG
- Vector Servos: LOBOT LDX-227 270° Digital Servo
- Propeller: 2 x 15x5.5 Inch MR
- Battery: LiPo 4S 6000mAh 25C, Li-ion 4S 10500 mAh 25C
I already do the Bench test, I have all the orientations and movements in the correct direction, about flight modes, which ones you recommend me? And about the PID tunning, what parameters you believe are the most important?
Have a nice day,
Gracias, seguimos intentando pulir el setup para AUTO, aunque el verdadero esfuerzo es el de los desarrolladores
1 Like
Hi again @ALEJANDRO_VAZQUEZ ,
I’m a beginner, I just prepare recently a tailsitter
From my part, I
- download and flash the autopilot with lastest version ( actualy 4.2 ), file “arduplane_with_bl.hex” at ArduPilot firmware : /Plane/latest
- read this part, for set the principal settings of the tailsitter
Tailsitter Planes — Plane documentation - detalied informations are here but I don’t know if it’s up to date about the lastest dev version 4.2
Tuning Process Instructions — Plane documentation - FlightModes : Q_stabilise at the start, Q_hover and FBWA (plane mode)
Question : what is the model of your wing ?
Regards
1 Like
Así es, pero pulir es un gran trabajo y conlleva mucha experiencia que considero totalmente usted la tiene. Tengo 20 años estudio ing Mecatronica en Mexico, y estoy próximo a terminar un tailsitter con vector thrust para aterrizaje en vientre, espero y me apoye en cómo usted planea una mission autónoma, me interesaría ver cómo es su flujo de trabajo en los commandos para después de que lea haga el tunning y vuele manual muy bien, ya al aeronave empezar tirar misiones automáticas así como usted lo hizo impresionantemente, estoy al tanto de sus consejos! Saludos amigo @Aticof
Perfect! I’m also a beginner!
Thanks so much for that resume of the information, I’m going to read all of that, I’ll let know to everyone my advances.
Hi guys, first time posting here! Hoping someone can lend insight to my problem.
Built a non vectored twin motor tail-sitter (my 5th one, just love this VTOL stuff). It has developed this problem where (in Q-Stabilized) he will respond well to my pitch forward command, even in relatively stiff wind. When I ask him to pitch back toward me, he seems to only have the ability to cope with about 15 degrees and he begins to fall so rapidly that forward pitch is just inadequate. I’ve adjusted Q_ANGLE_MAX to 80 but it doesn’t seem to help. I’m using an omnibus f4 with AP 4.1.6 (eddf0367)
My log file is here
https://drive.google.com/file/d/1A91-K5M6Tk71QwRH2Uxq_y61wxp8kV2d/view?usp=sharing
And speaking of, I’m not the best at reading logs - does anybody know of a youtube channel or other source that does a good job explaining how to set up and interpret logs?

Thanks so much in advance.
Bill
UPDATE: Found the problem! Turns out it was that one of my elevons was actually being mechanically limited in one direction (guess which one, lol). He behaves MUCH better now  . Regardless, I have still learned much in this discussion and thanks to Marius, Satoru and Henry’s points on Marius’s vehicle.
. Regardless, I have still learned much in this discussion and thanks to Marius, Satoru and Henry’s points on Marius’s vehicle.
That thing is GORGEOUS! 

1 Like
that looks like a MiniOrca airframe from ipbond:
I happen to have one of those, kindly sent to me by Sergio Checo. This is a recent video of me flying it with 4.2 dev firmware taken by another CanberraUAV member:

my parameters in that flight are here:
http://uav.tridgell.net/MiniOrca/logs/2022-01-30/flight3/mav.parm
2 Likes
I also think you have the weight much too far back. It will likely hover OK but in fixed wing flight it would probably not be stable and will quickly crash
this is the layout I have in mine:

the battery is a 5.5Ah 4S LiOn pack (from my Swan-K1)
2 Likes
Hi master of masters @tridge!
Yes it is! I’m from Tijuana, Mexico. I meet Sergio too, thanks a lot for that parameters.
I make a flight today, but I need to re check all the parameters, I’ll let you know any advance.
Thanks for answer me!
1 Like
I already modify that on my one, I balance the aircraft moving my batteries a little bit more on the top, and add some extra weights on the top too just about 100 gr, to have the center of gravity in balance.
I’m going to check all of that parameters and see what I miss.
Thanks a lot @tridge !


Hello @BillRevenaugh ,
Sure, you can find here one of the lastest logs with param, but, pay attention to the version
I use : ArduPlane V4.2.0dev (2251293e) and some parameters can be difference between the versions
https://drive.google.com/file/d/1KkEmANAnD0VaxUPcZPzywXlrCRQUcGwE/view?usp=sharing
@ALEJANDRO_VAZQUEZ
About tuning process, I don’t know if it’s a good aproch , like @Satoru_Sasaki , I start in the past a comparative list with params of @losawing & @Satoru_Sasaki & me , but I don’t finish the tests
Exemple for the Q_ROLL:
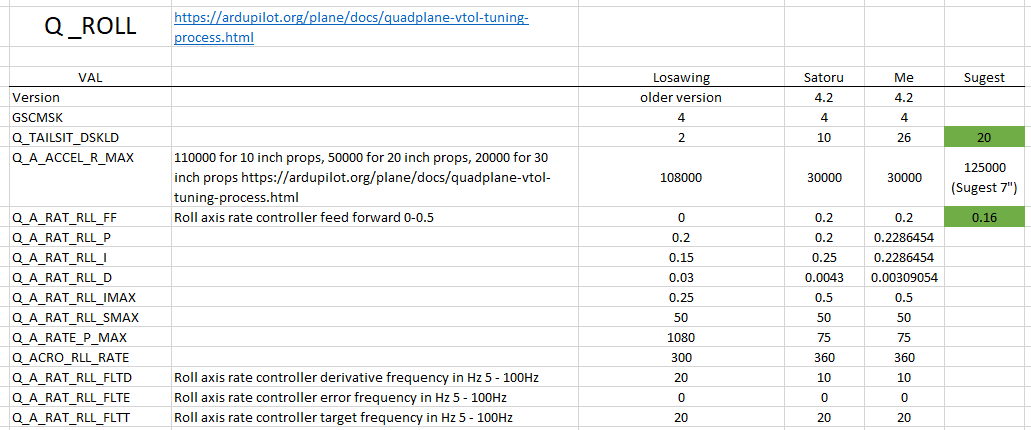
Regards
1 Like
Thanks Marius! Very cool, didn’t realize you could get params from logs - thanks for teaching me that 
 As for 4.2 - I followed your discussion with Satoru above. Did you feel like 4.2 definitely helped?
As for 4.2 - I followed your discussion with Satoru above. Did you feel like 4.2 definitely helped?


Hi guys!
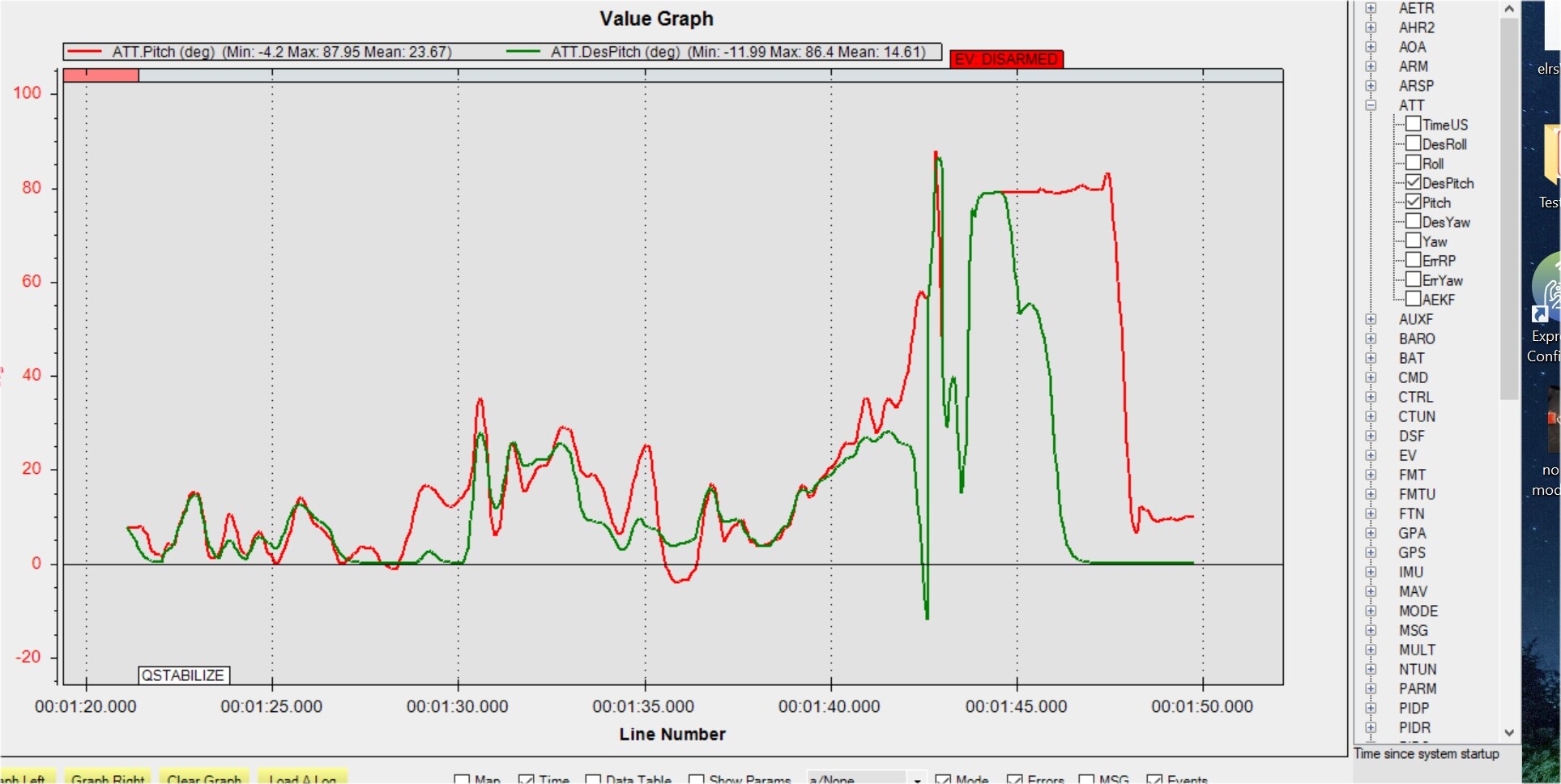
The problem with the vehicle continues, despite freeing up elevons . In QSTAB he just can’t recover from a pitch back toward me of more than about 30-45 degrees and he just heads toward the ground. I got to thinking maybe the design just requires too much weight in the nose to maintain factory CG (for forward flight) and so I “cheated” in Level Calibration by placing the nose down a tad thinking maybe I could remove his tendency to fall toward me. This didn’t help either. I also followed tuning up through and past step five (Thanks Melc!) and still no improvement. I’ve attached a log from a short 20 second flight in which this behavior is exhibited. @tridge - Would you possibly be able to take a quick look?
https://drive.google.com/file/d/1kVGidlIYXv68Z1yVuTGiaGqwm3jcRUS_/view?usp=sharing
Thanks guys!
Bill