@losawing that’s a great looking aircraft! You clearly put a lot of time into it. What are the fuse and wings made from?
This would make a great blog post if you fancy doing a bit of a write up.
I don’t suppose you tried QACRO at those speeds 
Not yet but this is on my list. For max speed I fly FBWA but this plane fly perfect in manual mode even at very high speed (with 20% rates and expo at the Tx level). I set the CG with a comfortable 8 to 10% static margin. The hover stability is not affected. I am still using a former binaries you made for me.
You are right and this is something I was thinking about. I will do it.
Less than 50 hours of work. Fuselage is made of balsa and wing is a foam core plated with hard wood. Nothing fancy but I made effort to minimize drag on a lot of details.
1 Like
Nice, well done !
Wood + Gel coat ?
Q_frame type = 17
The motor does not work, pwm=0
what is the reason?
My frame has no elevons
firmware4.0.7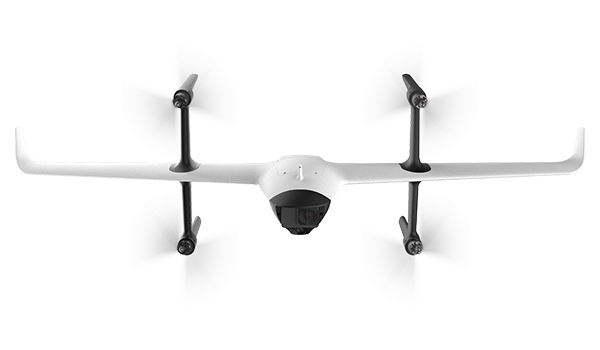

I think you want Q_FRAME_TYPE = 1 and Q_TAILSIT_MOTMX = 15
You will have to be on master/4.1.dev to fly with no elevons. Set the Force Qassist Q_OPTIONS bit.
1 Like
SO Q_FRAME_TYPE=1 Instead of 17
firmware 4.1 dev Instead of 4.0.7
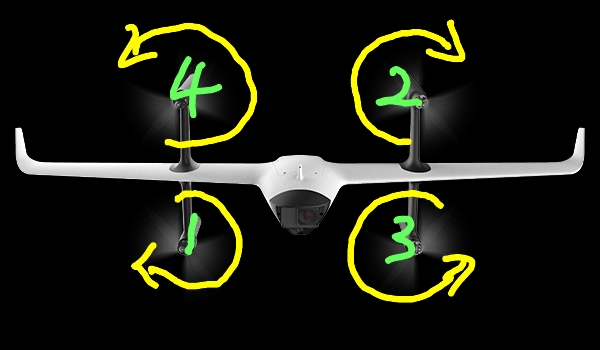
Does the motor need to be inward or outward?
the rotation direction will matter because of the tilited mounts, you might need H frame rather than X to match the rotation direction in the manual, hard to tell which from those pics.
The current motor is about 5 degrees inward
https://ardupilot.org/plane/docs/guide-tailsitter.html#guide-tailsitter
only has X without H

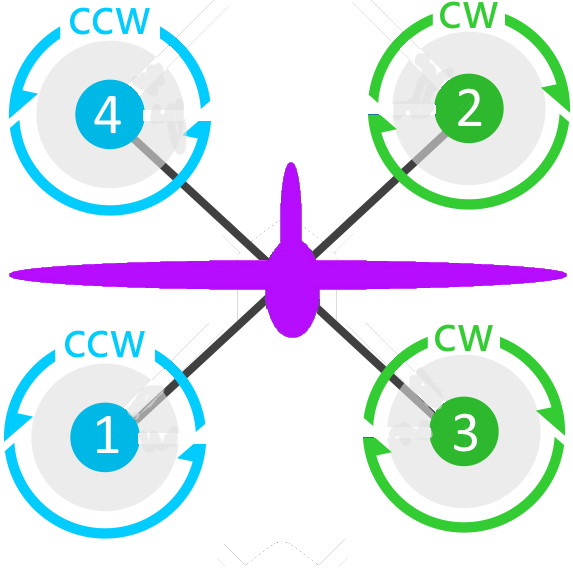
This configuration is not the right one for yaw control based on differential torque. It can not work as motors along a diagonal should rotates the same direction. You can see post 7 the one I have used. Motors must be inward. I think X or H is almost the same, it does nor matter. We need advises from @kd0aij about firmware version and parameters.
Is the setting of the motor rotation direction correct?
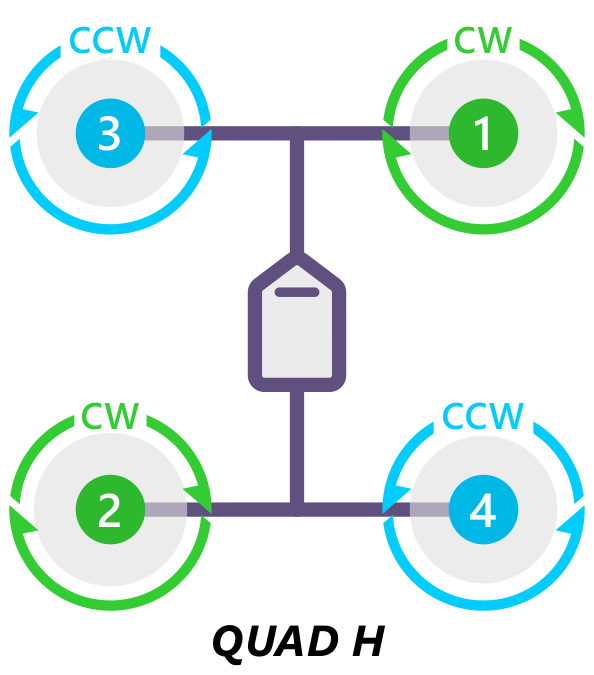
Or like this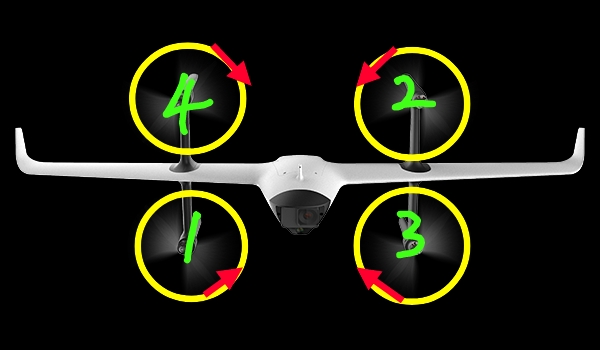
I had motor rotation according to the second drawing and motors inward.
BUT I am almost sure that the differential torque feature is not in plane 4.0.7 and the wiki drawing is meant for no differential torque. I suppose differential torque it is in 4.1 but we need confirmation from developers.
In master:
The H frame differs from X only in that motor rotation directions are all reversed.
Copter tailsitters now use the same FRAME_TYPE as normal copters, but have the additional options:
MOTOR_FRAME_TYPE_NYT_PLUS and
MOTOR_FRAME_TYPE_NYT_X
The NYT frames are the same as copter PLUS and X, except that differential torque is not used for yaw. The pending addition to the wiki is here: https://ardupilot.org/copter/docs/common-future-wiki-changes.html?highlight=future#on-tailsitters-page-under-tailsitter-configuration
I don’t believe the NYT (No Yaw Torque) frame types have made it into any beta or release versions of Plane yet. Also note that before addition of those frame types, quad-plus and quad-x copter tailsitters had no torque-based yaw control.
3 Likes
it is possible to have a CopterMotor Tailsitter using no fixed wing control surfaces, ie basically a quadcopter with a wing. For that configuration, all Copter motors would be set to be active in fixed wing modes via Q_TAILSIT_MOTMX and Q_OPTIONS bitmask would have bit 7 (Force QASSIST) set to have QASSIST active in all modes.
using no fixed wing control surfaces so should I set Q_OPTIONS=7? Still 128
yes, should work fine, you will have to be on master (4.1.dev). Probably not a recommended config tho, control surfaces are useful, gliding is nice.