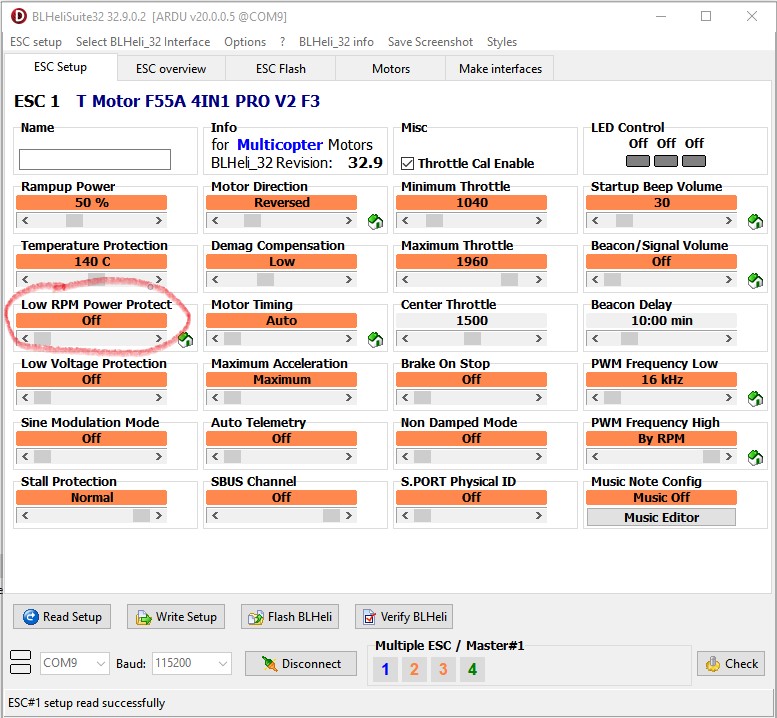
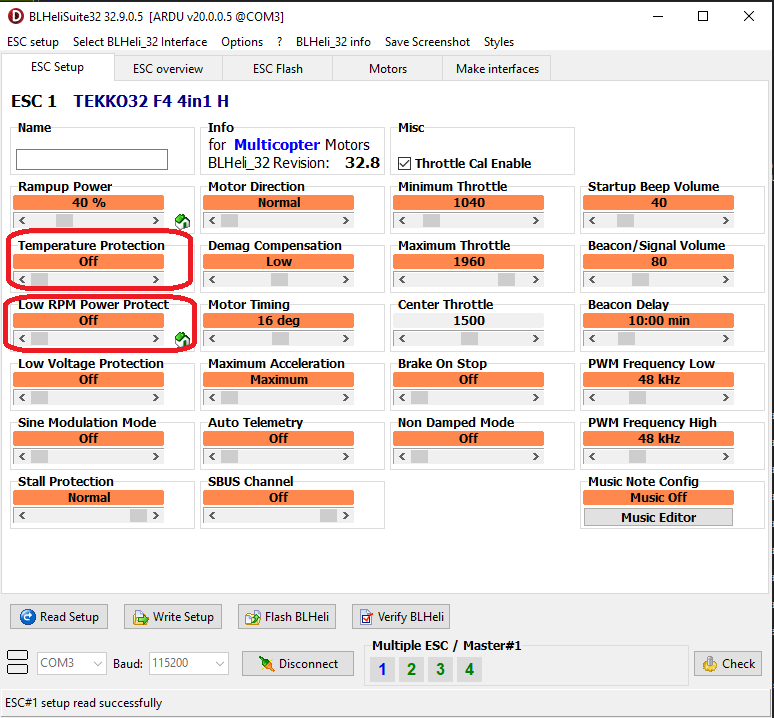
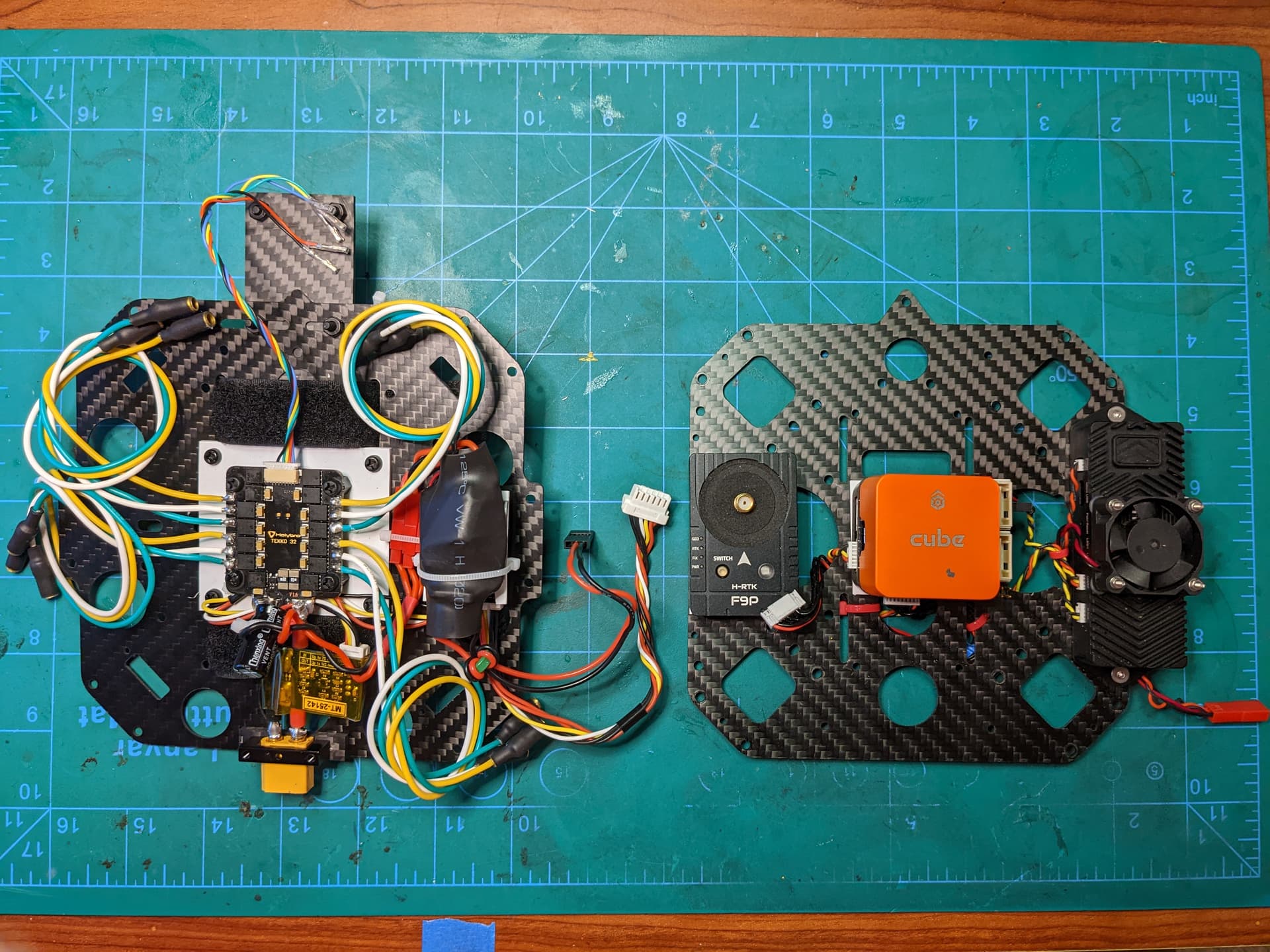
I’ve installed a 4-in-1 ESC a Holybro Tekko32 F4, 50A in a Hexsoon EDU-450 quad.
I’ve calibrated the motors using the Mission Planner motor test - they respond at super low percentages - 1%. So I’ve set mot_spin_arm=3 according to the documentation. (deadband + 2%)
Wanting to be conservative, I set mot_spin_min=6
I discovered that on the ground, with a half charged battery, (well above failsafe voltage) that the motors would spin up when I advanced the throttle - with the props OFF. But would not spin up with the props on.
A fully charged battery solved that problem. I’m curious to see what happens as the voltage decreases in flight.
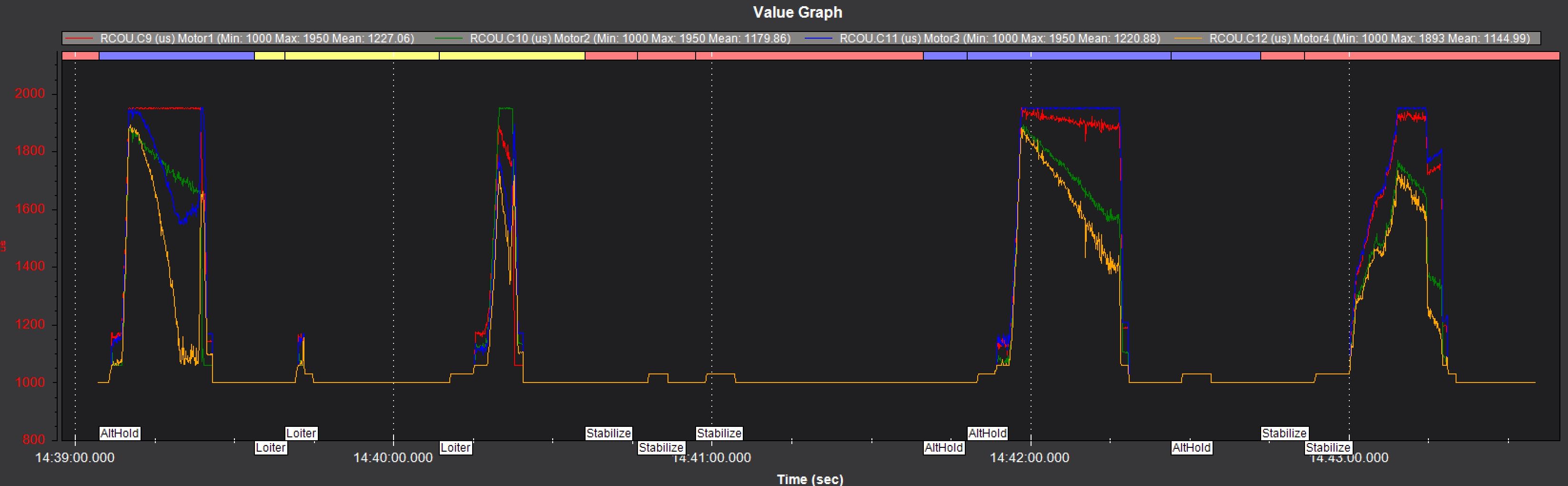
With that all resolved, I’ve tried takeoffs in Stabilize, Altitude Hold, and Loiter. In each case, at full throttle there was too little thrust to take off.
I originally was using Dshot-600, but dropped it to Dshot-300 just in case there was an issue there.
The motors run quiet and smooth - and stop super fast when the throttle is lowered all the way. And as @xfacta pointed out in a previous thread - it’s pretty nice to see the motors spin slow slowly at arming that you can visually see which direction they’re spinning.
I’ve re-read all the docs I could think of - hoping I’d missed something. Obviously I did miss something - I just can’t find it yet.
I wondered if the motor thrust EXPO might be wrong somehow - but I haven’t seen anything about Dshot and EXPO settings.
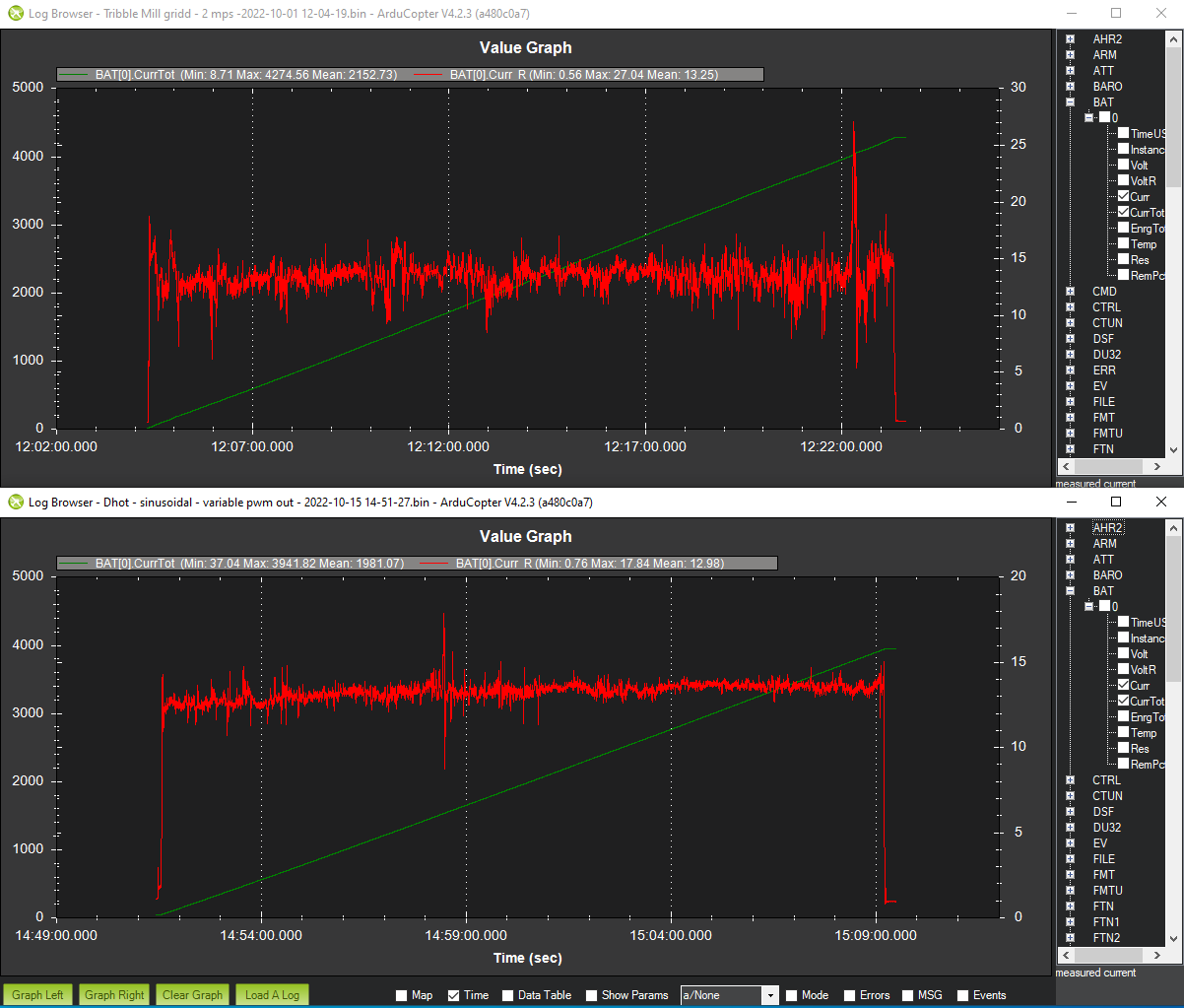
Lastly - while I can see the throttle input by charting RCIN_3, there are no RCOU values for Dshot. How can we see what the flight controller is commanding the ESC to do?
I’ve uploaded a BIN file - I’d really appreciate some suggestions. Thank You