Hi all, I’m having some issues with my drone. At first, when I took it off in stabilize, it was flying well, and the same with althold. When I switched it into Loiter, the toilet bowl started. I have leveled the motors, the vibrations are within normal ranges, and I’ve done the compassmot calibration. I’m at a loss as to what else I could/should do, so I would greatly appreciate any recommendations. I should also comment that after flying it well in stabilize early in the day, the drone’s performance seemed to worsen. By the end, there was significant yaw on take off and the drone was practically unflyable. I’ve attached two logs below, with the first link being to the first flight. I’ve researched as much as I can to try and fix this issue, so I’m hoping someone may be able to review my logs and see if there is a hiding issue that could explain my difficulties. Thanks.
Usually the toilet bowl behaviour denotes compass inconsistencies.
Calibration? Orientation? Offsets?
But the real issue here is you are underpowered/overweight.
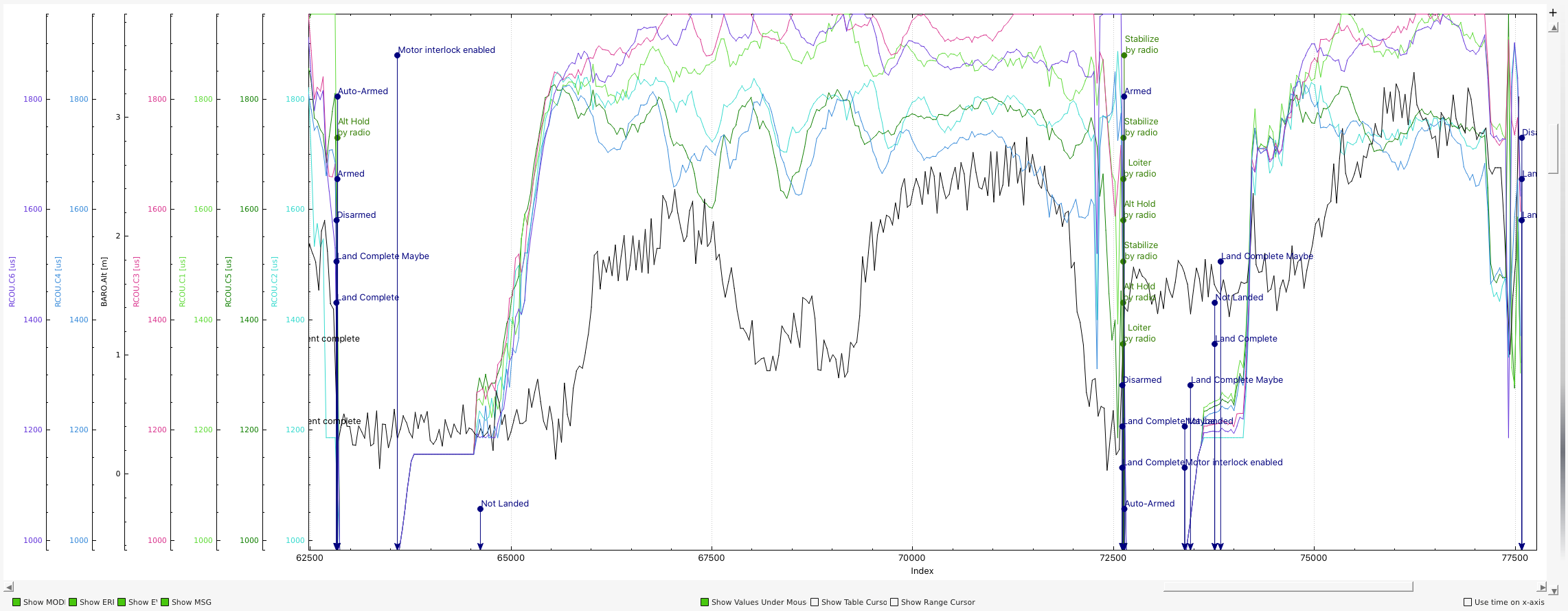
You can see here that you are not only at max throttle but due to an imbalance in the copter motors 1,3 and 4 are maxed out just getting into the air.
I am more surprised the FC was able to keep it together to get this rig into the air.
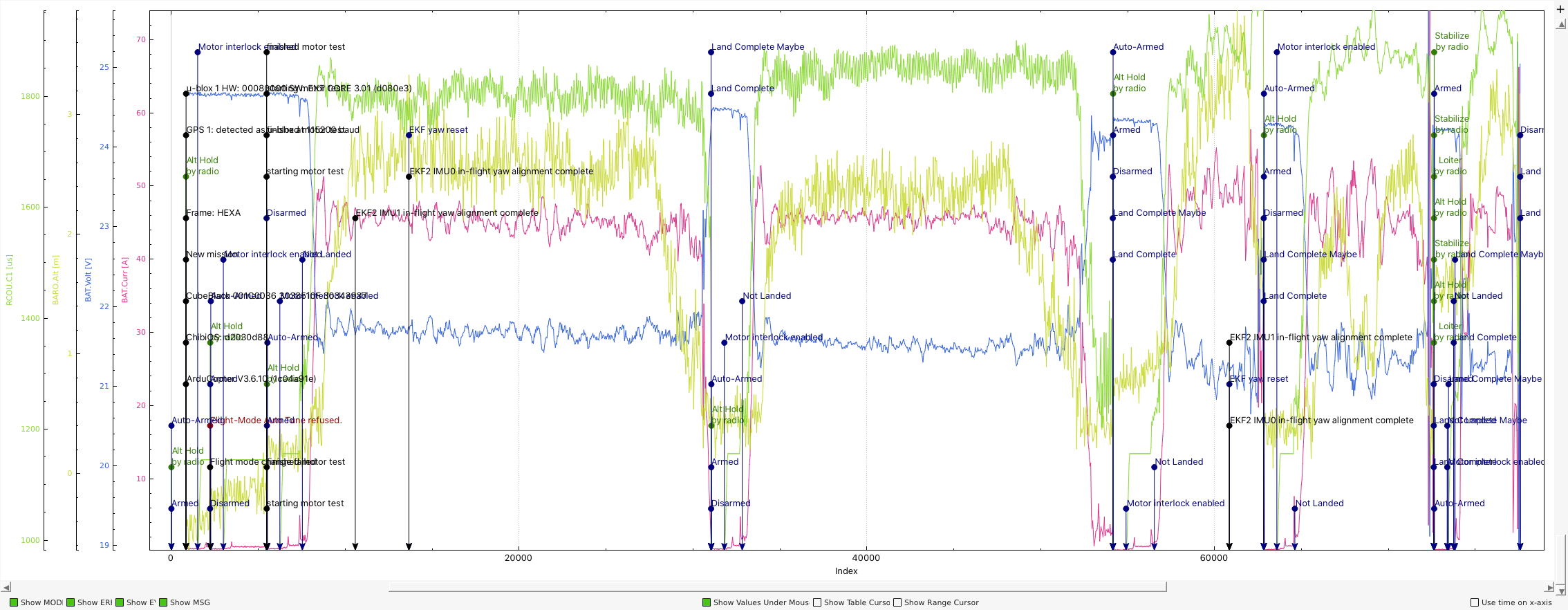
Looking at battery, there is a large drop in voltage for a 6S pack, and you can see here that the PWM going up with each flight attempt as the voltage drops.
With a better battery you might not have noticed the problems.
21volts is normally our failsafe for a 6S pack.
Mike, I really appreciate your thoughtful response. My motors were rated for 6-12s, so I decided to configure my batteries in series and this seemed to entirely solve the issues! The loiter performance was much better, and my drone was now hovering closer to 26%. I guess the motors really prefer 12s over 6s… Do you see any other glaring issues from my logs today that I should look to fix? Please disregard any power numbers. I had to wire a series of BECs to step down the voltage for the FC. New power module should be getting in tomorrow.
Flight log: https://drive.google.com/file/d/1X5VVz4bOgetgQf--3V47w8_VPa--TNpu/view?usp=sharing
The motors look much happier at around 1500 output for hover.
I did notice your Vcc is running a bit low at 4v when it should be around 5v.
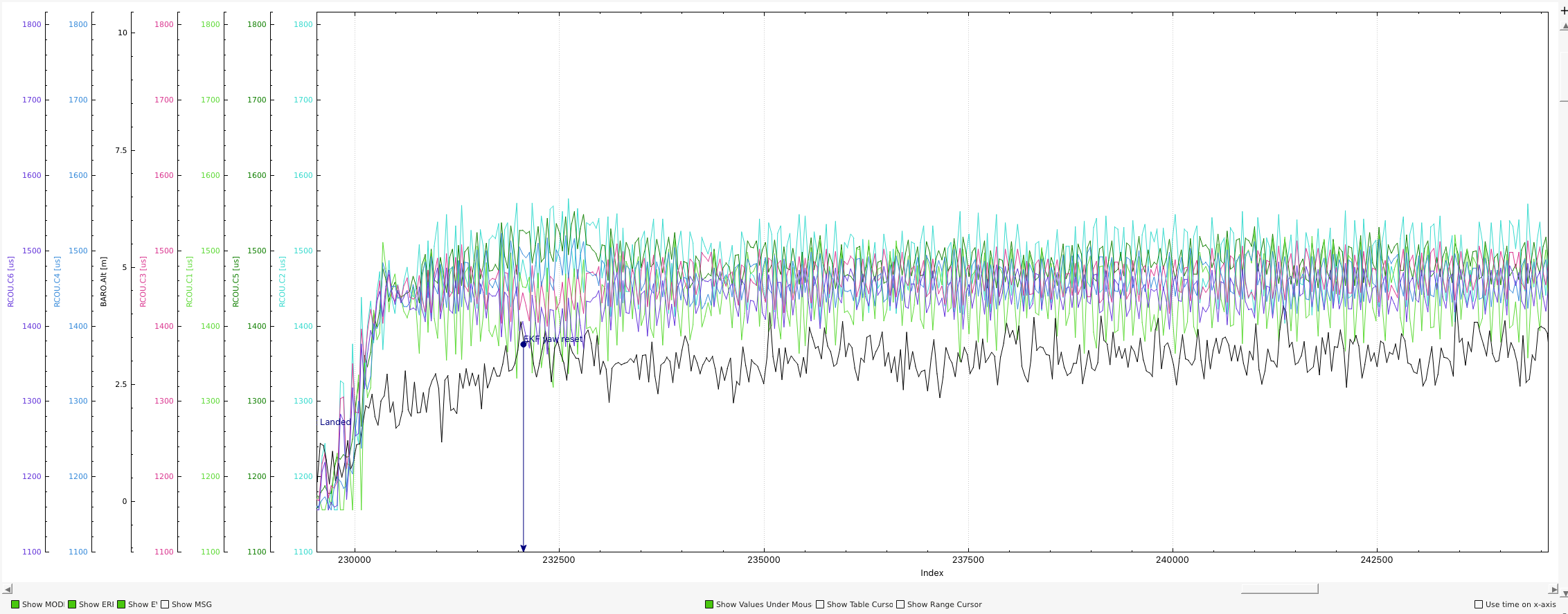
One other thing, after your autotune the Desired/Actual in pitch looks very busy.

This may or may not degrade your performance but it will suck more power than needed.
Mike, I really appreciate your feedback. The drone is continuing to improve and I was able to get through two rounds of autotuning today. The drone appears to be flying better, but I’m trying to analyze the logs to confirm if it has improved. I noticed that the vibrations increased…is this concerning? The drone passed the eye test and looked great, but want to make sure all is well internally so that I don’t face an issue down the road. Thanks again for all of your help.
Log from autotuning: https://drive.google.com/file/d/10PJ11uDI84C__iT8yzvEj8HUF0Hz83PP/view?usp=sharing