I just finished building my drone and I took it out to fly a couple times and every time that I put the drone in loiter mode, the drone wobbles a lot. When I take it even higher, above the height of trees, it wobbles even more. I have tried auto tune 2 times and it didn’t finish either time because suddenly it started to get windy which messed it up and I landed and then disarmed. I was thinking that maybe some of the partial tune would have been saved? But I’m not sure.
When I try to click on the advanced tuning tab, it won’t load the advanced tuning page. I tried this on a couple computers and no luck.
I’m not sure if I got coordinate systems right or if it makes sense at all. But if you can’t seem to tune it out then might as well look into this possibility.
Thanks! I didn’t even know this was a thing haha. I’m traveling right now, but I’ll be back in 5 days and give that a shot, and let you know how it goes!
Thanks for your response! I just weighed my drone and it is around 3.75 lbs. The motors I am using are 2212 920kV with 9 inch DJI props.
The drone hovers at right above half throttle so would more power help? Also, when I remove my gopro which is about a quarter pound, the drone still wobbles. But maybe that isn’t a large enough difference to change the wobble.
Could I just add bigger props and would that work? If not, it would be a huge help if you could please suggest some motors that could work for this spec. I am using a 3s battery. Thanks!!!
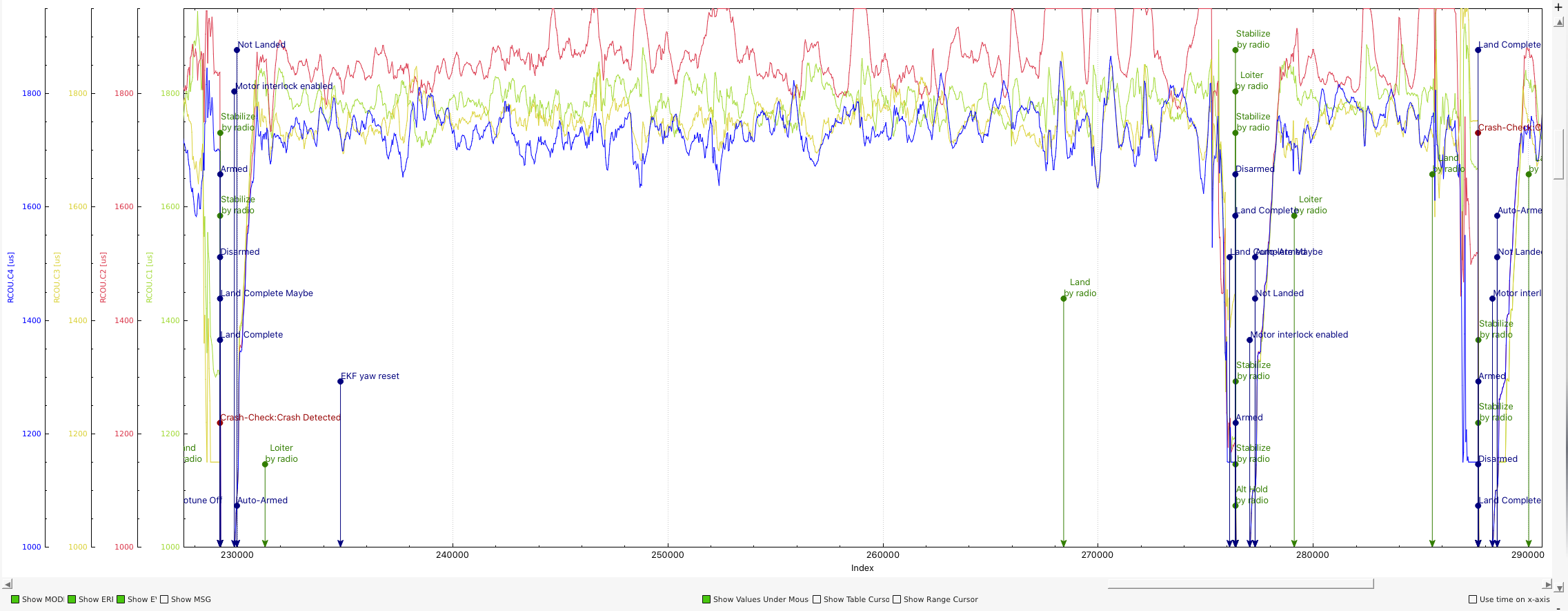
It’s mid-throttle on the stick because it has learned a relatively high MOT_THRUST_HOVER of .685. And at that throttle command the motors are bouncing off of max output as Mr. Boland noted. It’s overloaded/underpowered. Assuming you are using 3S battery power (don’t know your voltage is not calibrated) the easiest solution would be to switch to 4S. Assuming your components are 4S capable. You could try larger props if they fit the frame.
Thanks for your response! Luckily my components are compatible with a 4s battery so I’ll go ahead and buy one of those and do that larger props!
Also, you mentioned that my voltage isn’t calibrated, how can I go about doing that?
I’m looking for batteries on amazon and there is a variety of batteries with different discharge rates. My existing 3s is a 50C battery. Could I go with another 50C battery or should I go for something more?
Thanks!
In Mission Planner on the Battery Monitor page. Measure the battery voltage and input it in thr “measured battery voltage” box.
You don’t even need a 50C battery. 20-30C would be fine. Be careful of the battery weight. What you want is greater thrust/weight ratio so you will have to drop capacity from the 3S.
Sounds good! Thanks! I’ve gone ahead and ordered a new 4s battery. Unfortunately the only battery I could find in a reasonable price is 50C and I dropped the capacity slightly which unfortunately keeps the same weight.
But, based on ecalc, this spec seems that it should work with hover at 50% throttle. I’ll keep you updated on how it looks once I get the parts in a few days
Thank you so much for your help!!
Paran -
You might also want to sign up for e-calc, which will help you estimate what combination of weight, props, and power you need for your drone to fly correctly. In your original 3s configuration with 9" props your drones thrust to weight ratio was only 1.2 to 1 (seriously underpowered) as a good thrust to weight rato is 2 to 1. This is exactly confirmed by what @mboland saw in the data log. note also that all motors have a maximum power limit, exceeding that can result in burned up motors or in-flight fires!
I just purchased the ecalc membership and after plugging in my numbers, the electric power is at 280W whereas the maximum for the motor is 250W. Any suggestions on how to fix this?
The thrust to weight ratio though is at 2.7
Actually, I think that the real issue is that I can’t find what is the max power rating of this motor: Readytosky 2212 920KV Brushless Motors CW CCW for F330 X525 F450 F500 F550 DJI Phantom Quadcopter(4PCS) https://www.amazon.com/dp/B075DD16LK/ref=cm_sw_r_cp_tai_BbEtDbJARFRXA
I can’t find it anywhere. And I think it resembles a DJI 2212 920kV motor, but that also has different power ratings everywhere I look. Some places say 370W which would be perfect, but I have no idea.
After plugging it in as if it is 370W, I actually got better performance with 9 inch dji props compared to gemfan 10 inch props. Any ideas why this is?
yes, this is a problem that plagues the industry. I do known highly regarded people who have used 4S on the DJI motorss without problems (possible “some” overheating), 370w sounds way too high Try replacing the RTS with the DJI in ecalc and assume that you will probaby get something less.
Also - you can run some tests for yourself. Tie the drone to something solid, and run the motors (or only one motor if you want to be safe), run the motors with 9" prop at various levels of throttle, and see if it gets hot. - and then do the same with 10" props and/or 4S, etc. start at low throttle and dont go to 100% until youre sure it wont burn up.
good luck! Ive always found the testing part the most fun part.

 so I’ll go ahead and buy one of those and do that larger props!
so I’ll go ahead and buy one of those and do that larger props!