Hi
I have used Kakute H7 for a drone build and since the beginning the drone has a weird vibration issue.
I have checked everything but no luck yet which insludes (propellers, frame, fc dampers, motors and ESC logs, etc).
I am running the latest version of arupilot software on it and tried different settings, even changing Gyro filtering with notch filters.
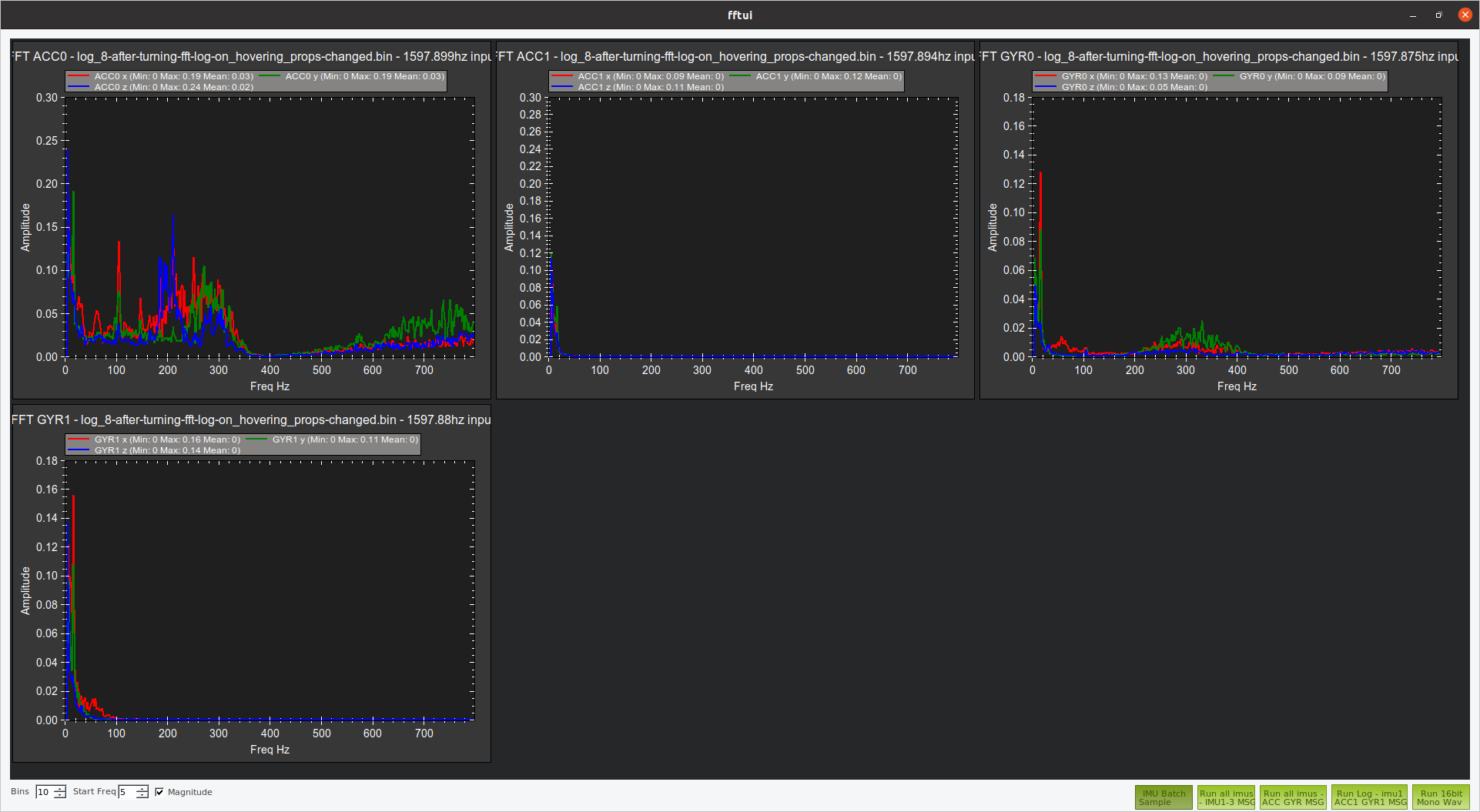
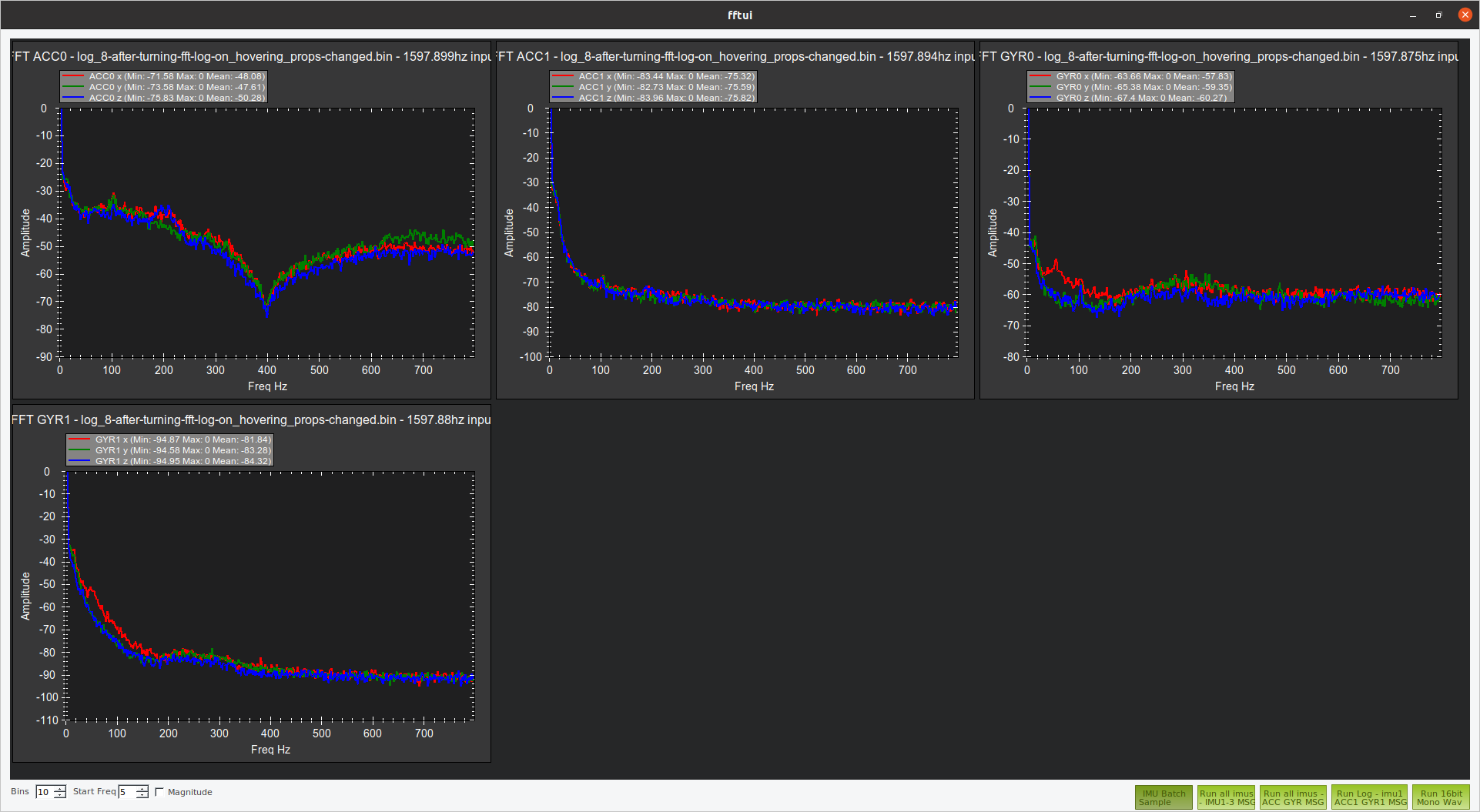
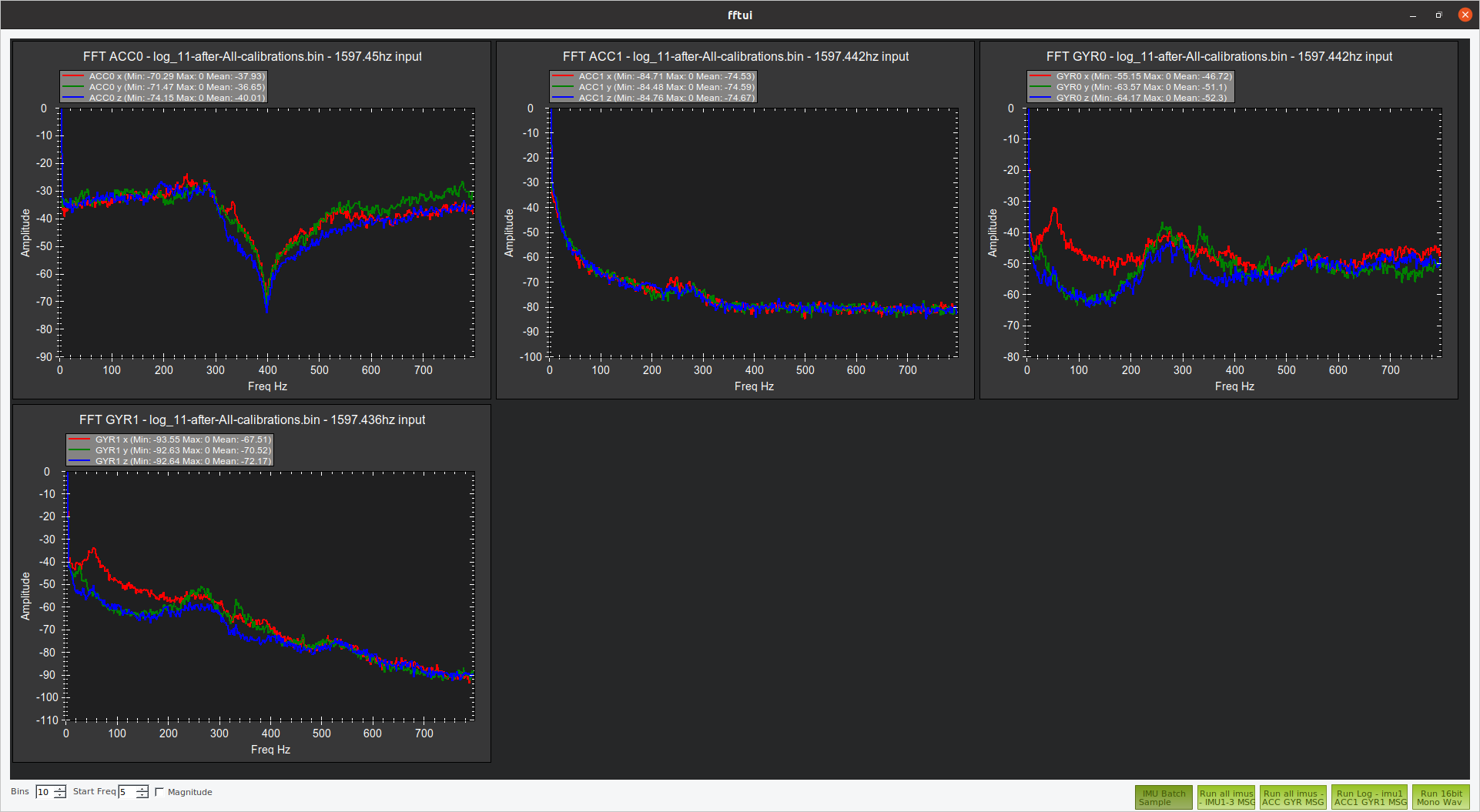
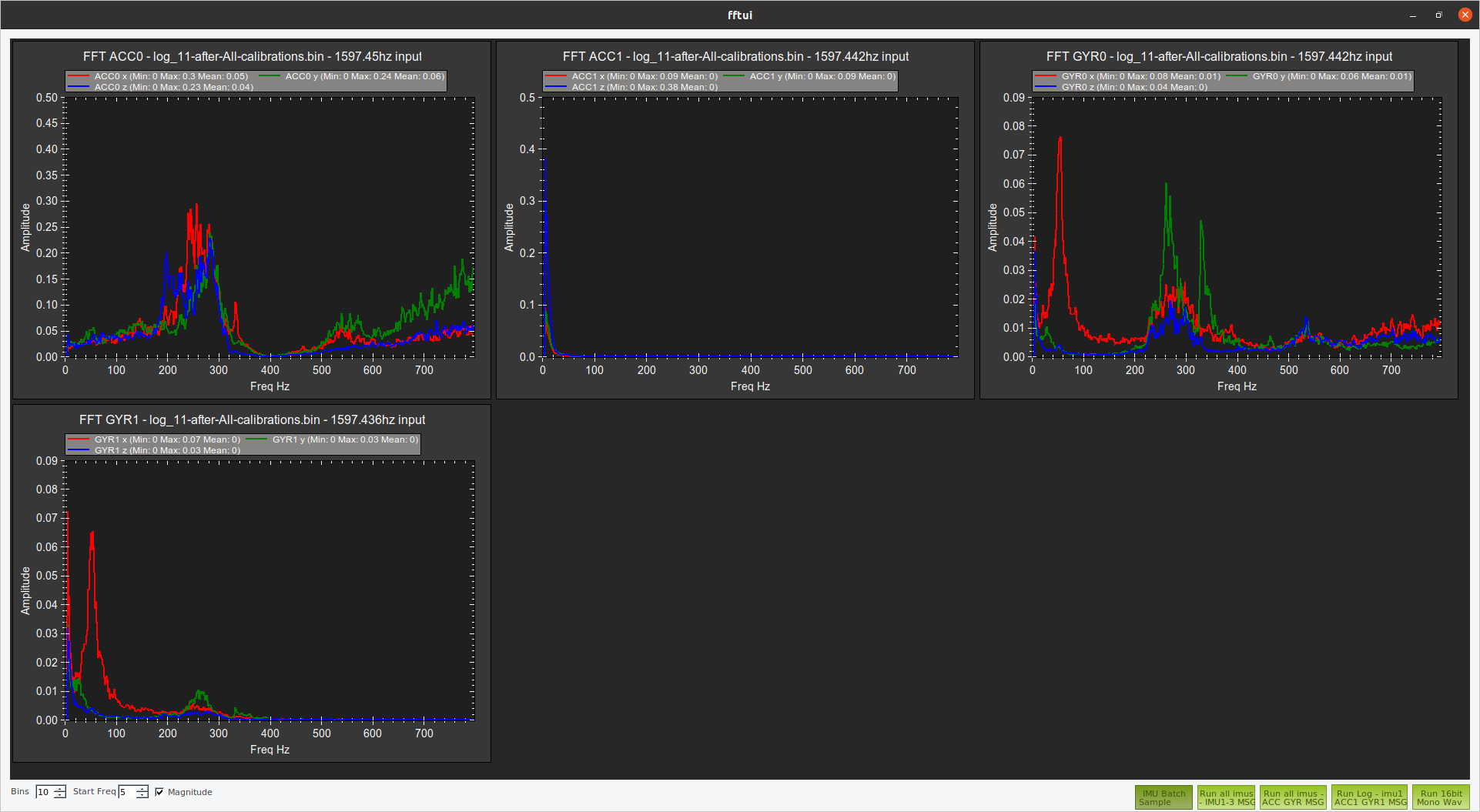
A log of hovering for a couple of seconds can be find here and two images from that is attached (in one of them the magnitude boxed checked).
The weird thing I notice is a huge drop in accelerometer raw graph (FFT ACC0 before filtering) around 400Hz that you can see in the attached picture (second image).
I wanna know your thoughts on this and if you have any suggestions to solve this issue of vibration and accelerometer abnormal graph.
Your efforts should start with basic configuration and tuning. This craft should not have left the ground on the default parameters present. Start here Everything you always wanted to know about tuning.
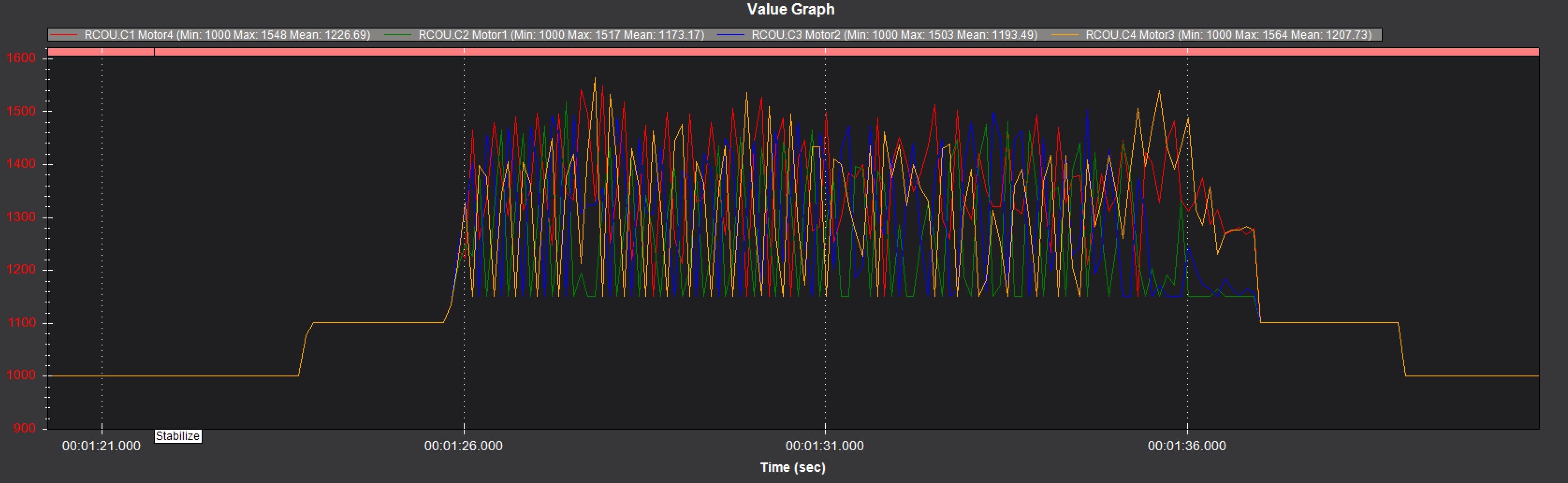
Just one example of why flying on default parameters is a bad idea. Look at this output oscillation:
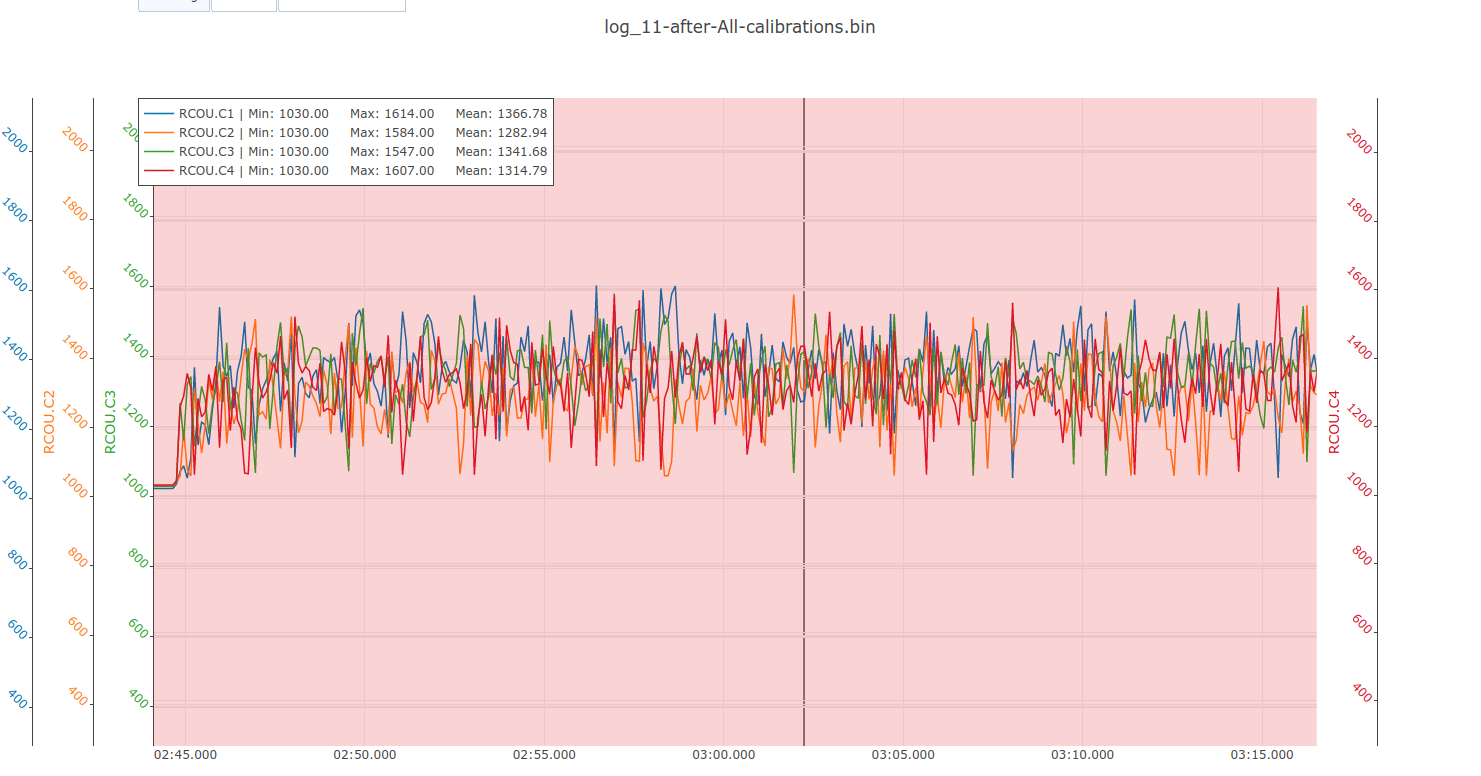
It looks like you did work your way thru the tuning guide but there is still oscillation on the outputs. Drop the Rate Pitch & Roll P&I values in half. And set these:
PSC_ACCZ_I,0.36
PSC_ACCZ_P,0.18
Forget about using Mission Planner for Notch Filter evaluation, use the Filter Review Tool
And set the LOG_BITMASK back to default so you have what’s needed in the log.
You only need this INS_LOG_BAT_MASK,1
And set this to default SERVO_BLH_OTYPE,0 You have it at 4 or Dshot 150 but you have MOT_PWM_TYPE at 6 or Dshot600 which is what you want. But this is what you have: