Please am new with ardupilot
I have finished configuration and calibration of the ESC but when I try to fly the drone keeps falling one side.
Please can someone help me out.
Please post your attempted flight log (.bin) and a photo if your copter.
Provide us more information as mtnsurveyor says please.
It could be several different things. Bad accel/giro calibration, wrong motor spinning direction, ESCs connected to wrong inputs, etc.
Best regards.
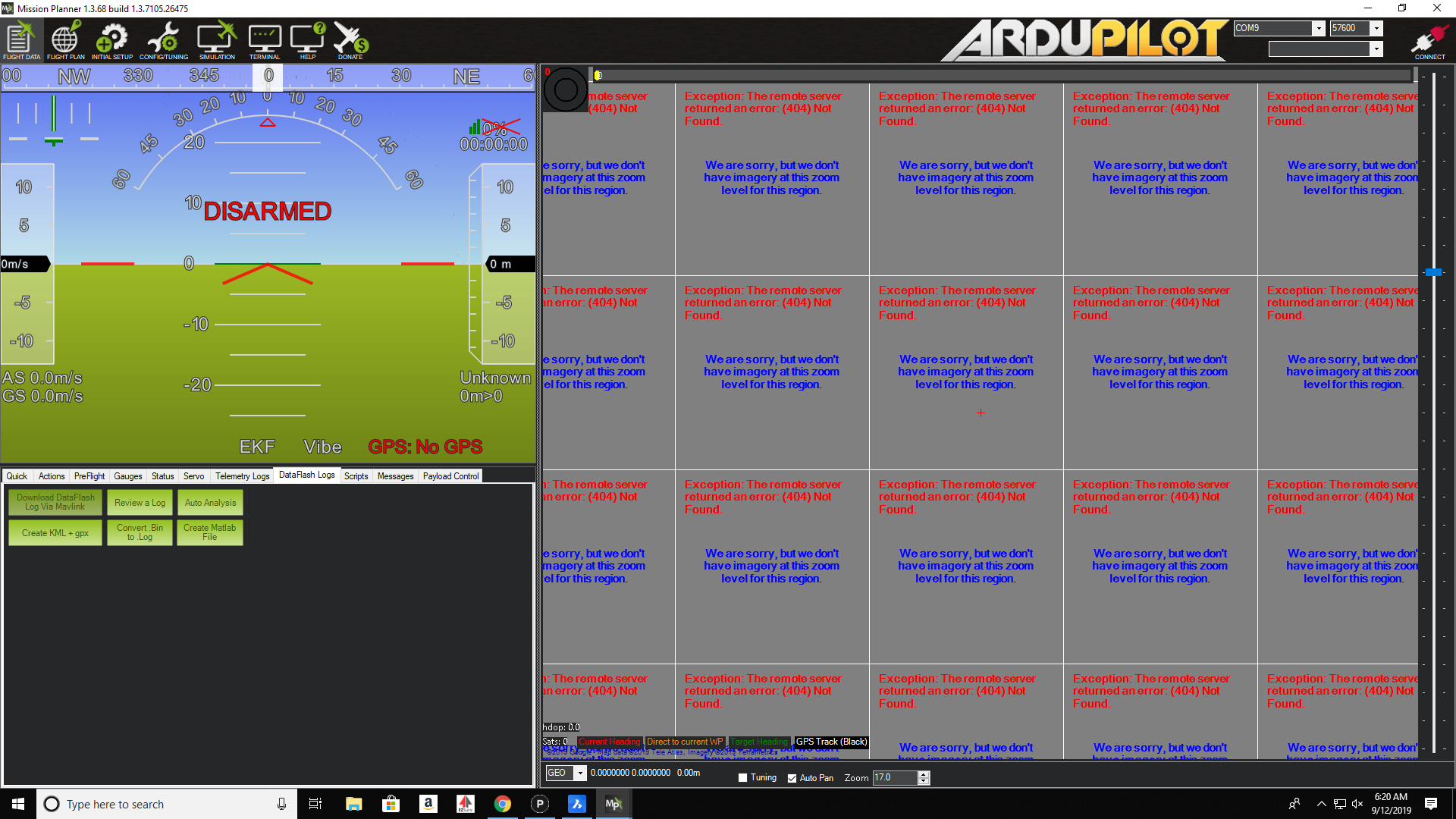
Please how do I check my flight log (.bin)
Am unable to send picture too
you can download log from FC by mission planner
http://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
Sound something bad connected, esc spinning in bad direction or props in incorrect position, check everithing. Or motor/esc fail.
The easy way is to remove the card from your FC. My preferred way is through MP just to save ware&tare on the chip reader
Why can you upload a photo? Either reduce the size or use google drive.
1 Like
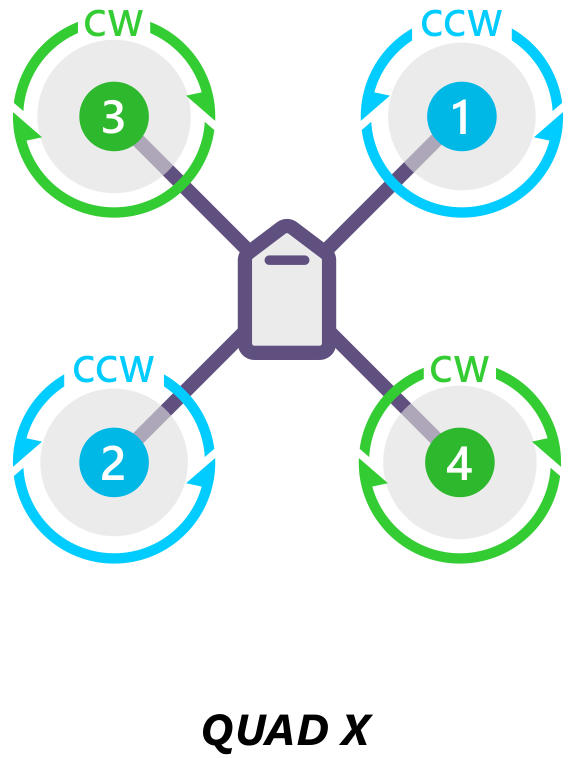
Seems to be some motors are spining wrong side…
Pls check this motor layout for a quad
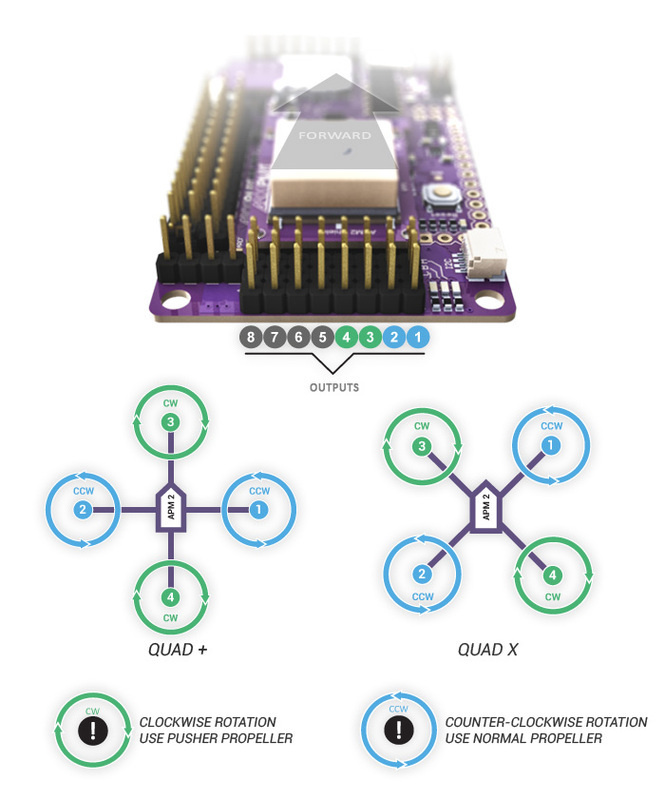
If you are using ardupilot, pls see this picture
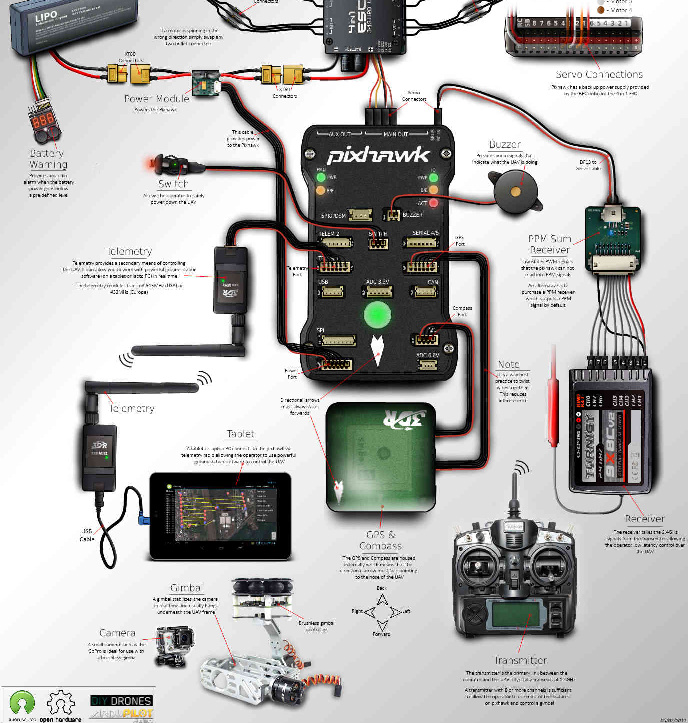
Fot Pixhawk, this one
Finaly, use the test motor tool under Initial Setup- Optional Hardware. TAke out the props and there you can test motor by motor and the the spin.
Good Luck!
I have swaped the motors and calibrated the esc but still not working the quad copter still filp one side
Can the fault be from the motor?
If the escs are connected properly, maybe the autopilot orientation? That can be set with AHRS_ORIENTATION. If that is all right, maybe some of the motors are rotating in the wrong direction?
When I set up a new frame, I usually do a simple test before putting the props on and try to hover. Arm it without props in ACRO mode, and put your ear near each of the motor, and check it is accelerating while needed ( front motors while pitching down, left motors while banking left, and so ). Then with the same procedure check if the motors respond accordingly to your stick inputs. If everything responds as it should so far the problem is probably some motors spining in the wrong direction or a cw prop placed instead of a ccw.
Double check this, it is probably something like it.