Hello, everyone. Can anyone help me regarding my current logs? My drone was able to takeoff and hover then it suddenly crashed. Just needed to confirm if its motor/esc/prop failure.
And in which part of the logs to do I need to look to confirm the motor/esc/prop failure.
the havoc started around 124.17 seconds of the log time;
prior to that, the copter was gently hovering for about 4 seconds;
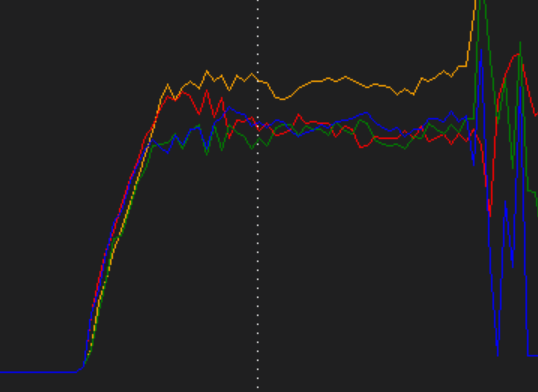
during that, all motors (according to RCOU log entries) were receiving PWM of around 1610, except motor 4, which was getting something around 1700, which is suspicious;
at the event, the following happened:
VIBE skyrocketed,
motor 4 maxed out and stayed this way for long, possibly until the crash,
motor 2 also maxed out briefly, but then went chaotic,
motor 3 probably also peaked but then went to minimum,
pitch diverged backward, roll to the right, yaw did not change much.
Everything tells me that something in the power train 4 died, and really high vibration coincident to that moment points rather to a propeller failure. The fact that the initial PWMs were higher on that motor probably hints that the propeller was slipping right from the beginning and got overheated or shattered. It could also be the ESC sync failure though, because in some conditions I believe this can also provide a higher required PWM and high vibrations at a failure, but my feeling is that the former explanation is somewhat more likely.
Wow. This a very thorough and helpful explanation. What we’re going to do now is
Check the side of motor 4, or probably even change motor 4.
We will also change motor 3. This was the propeller that went to the ground and unable to spin and then overheated.
also, can the initial PWMs also be checked without the propellers to check if all the PWMs are in the same level like this part of the log you pointed it. (Yellow was the motor 4).
Nope because this requires the machine to hover. Only then it would able to feel that it may need more output on a specific motor. If your ESCs were able to send RPM telemetry, you could plot PWM vs RPM and see whether there is some kind of strange behavior, but strange things (such as ESC sync issues) sometimes require load to be manifested.