We are using the 4.3.7 version firmware(semi auto firmware), we observe that in auto mode the drone height start decreasing from the given altitude. Also we can control the throttle in auto mode. i was flying in poshold mode due to issue in auto mode. The drone had crashed while in poshold mode. I am attaching the log file related to this issue. Please help in this issue.
Note:
Flight controller: Cube orange
Version: 4.3.7 semi auto firmware
I have done the autotune and notch fliters but enable to trace the problem, Please see that i have correctly assigned the parameters in X,Y,Z directions. or any parameter to be added
if you have done it then it should not be these default values.
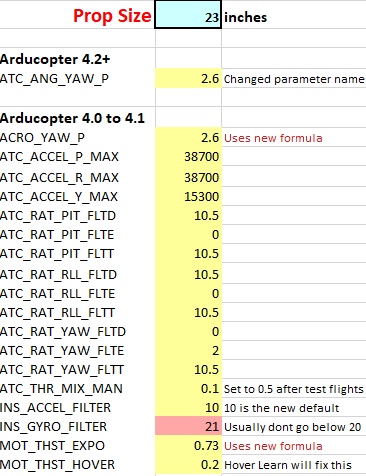
|ATC_ACCEL_P_MAX|38700|
|ATC_ACCEL_R_MAX|38700|
and your ATC_ACCEL_Y_MAX,9000 is unusual for 23" prop drone.