Hi All,
I am semi-concerned after a failed AutoTune test today. This has happened to me just another day ago and it was during an optical flow calibration test.
I am very unsure as to what is going on but the drone during the test randomly fell into a chaotic spiral down to the ground. I am posting the logs here in hopes that someone could provide me with some insight.
I am running with a Pixhawk Cube and a Here3 GPS with a 4S LiPo. Let me know if you need any other additional details!
Hello @aniforatos
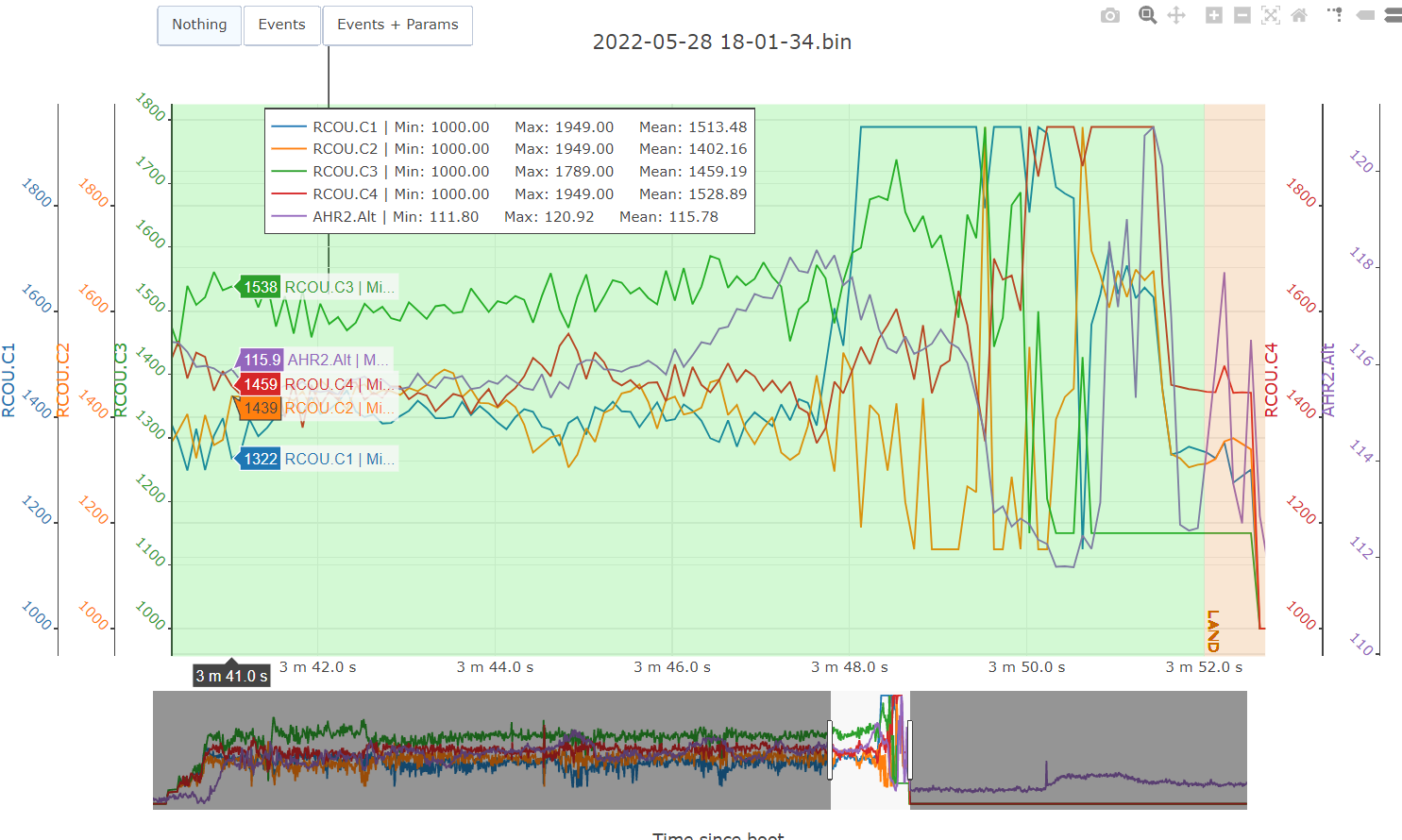
It seems to me that you experienced Motor 1 failure. Check this out:
Your Motor 1 saturates at maximum for more than 1 second and you start to loose altitude. Before this, everything seemed to be fine. Double check your wiring and ESC + Motor connections. Maybe a bad solder or a loose connector could cause this.
1 Like
Thanks for this! I will check the path for continuity; My hunch is that the motor may just be failing considering I had it on a different build and crashed VERY frequently with that build.
I will report back with my findings, thanks again!
Wont be a couple of days before I report back, I want to get at least 30 mins of flight time before I say it is fixed.
After replacing the ESC and the motor, still just had another crash out of no-where.
1 Like