I did this and uploaded the params to FC. Im now going to try the motors in mission planner.
1 Like
Unfortunately the motors are acting the same.
Should I maybe do the esc calibration again?
https://ardupilot.org/copter/docs/esc-calibration.html
And also I saw a video from Joshua Bardwell flashing BlueJay to all my BLHeli S ESC’s

Should I try it?
I personally never used it. So I have no opinion.
What do you think about doing this?
Im asking because in the documantation of AMC you say:
ESC Calibration
Do not make changes here, these parameters will be set later on the Motor/Propeller order and direction test section
Dshot ESCs do not require calibration. That is only for PWM ESCs, so it is not applicable to you.
Do you have anything in mind that I can do?
I can maybe try to unistall and reinstall the firmware.
Or I can try to change from BLHeli S to BlueJay.
Im confused because I previously installed inav in my fc and did some test take offs and it was ok.
Before I did anything with AMC, I think I found the reason why the drone didn’t take off, because I had the propelers send air up, instead of down.
But now I need to make some changes in order to make progress, because the motors doing this twitching thing isn’t helping.
Flash Bluejay and configure for Bdshot.
2 Likes
Yes. Once you are set up for BDShot then you can use RPM filtering. I have flashed many BLHeliS ESCs to BlueJay and I’ve never had an issue (firmware related) with them once I did it.
1 Like
I flashed the BlueJay firmware in my esc’s and i’m attaching two youtube link with videos of the motor test with mission planner and then an arming proccess. I want you to tell me if you know, if the sounds that the motors are making are ok.
Motor Test
")
Arming

Im a bit worried of the sounds that the motors did, when I plugged the battery in the arming test and I should have waited a bit more before I switch the ch5 switch to arm the quad.
If all are correct, should I continue with the AMC to setup the following parameters?
Thanks in advance!
Really hard to say if they sound good. But that order was wrong if you were doing the test ABCD.
1 Like
I forgot completly and I’m changing them right now in the Servo Output tab in MS.
Did you configure for Bdshot?
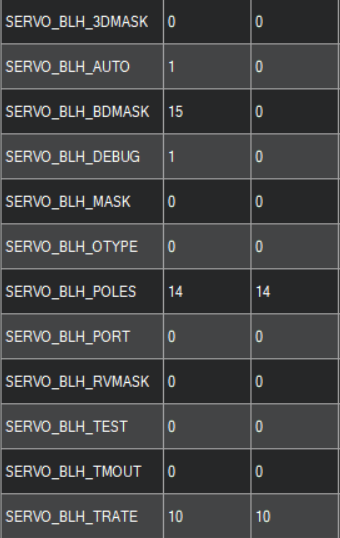
I have set MOT_PWM_TYPE, 6 (for DShot600) and SERVO_BLH_AUTO, 1.
Im trying for some time to make the motors spin in the correct order but I can’t.
I saw this post
but I’m completely lost.
Thanks for the help in advance, and Im really sorry that Im wasting your time with some unnecessary questions.
You need more than that for Bdshot. Set these:
SERVO_BLH_BDMASK
SERV0_DSHOT_ESC
Run Motor Test. Write down the order they spin in. If they are incorrect for the Frame Type you have re-order the servo channels until they are right. What’s the problem?
Because I’m not in the laptop right now, I don’t remember, but I’m going to see them.
The problem is that even though I changed the motors in the servo output tab, I can’t get them right.
Use this procedure,
change motor 1 output SRV1_FUNCTION until it is correct. Keep on activating the motor 1 output and check if is now on the correct motor
Then…
change motor 2 output SRV2_FUNCTION until it is correct. Keep on activating the motor 2 output and check if is now on the correct motor
And so on.
2 Likes
I configured:
SRV1_FUNCTION = 36(Motor 4)
SRV2_FUNCTION = 33(Motor 1)
SRV3_FUNCTION = 34(Motor 2)
SRV4_FUNCTION = 35(Motor 3)
and in the Servo Output I have:
1 -> Motor 4
2 -> Motor 1
3 -> Motor 2
4 -> Motor 3
And when I’m in the motor test tab and I press:
Motor A -> front right spins CCW
Motor B -> back right spins CW
Motor C -> back left spins CCW
Motor D -> front left spins CW
as the QuadX betaflight motor order.
Is it okay?
Thanks in advance!
I have them set as:
SERVO_BLH_BDMASK = 15
SERVO_DSHOT_ESC = 2
Now we’re cooking with gas!
1 Like
Post your updated methodic configurator files once you have the notch filter figured out.