The closest to that is to use FFT reference for the Notch Filter. There are some parameters that can be tweaked but it will typically function OK with defaults.
Where can I set the flight start voltage? I thought that the BATT_ARM_VOLT is the one that starts the flight as long as the battery has the required voltage.
The motors I’m using require 7-12 volt. Apparently, a 4s battery will be too much.
I think it depends on you’re gear. I’ve built drones that fly so well on stock defaults that I haven’t bothered to do any significant tuning because I didn’t think I could make it much better. I’ve also had others that were un-flyable until the tuning was addressed. Generally I’m going to say that you should go to the FFT graphs and set up the notch filters. You only stand to make improvements so there’s nothing to lose and it only takes a few minutes (once you’ve done it a few times ![]() )
)
As for the logs … Just dig in and start looking at them. One thing that will really help is look at the logs that get posted here on the forum and follow along with the analysis of some of the smart people (that’s how I got started). You’ll notice that may of us here have our own starting points and key things to look at based on what’s kicked us in the butt over time. There isn’t a real step-by-step guide to looking at logs, because no two are the same. And don’t be afraid to ask about a log analysis on a thread. I don’t think it’s off topic if someone is looking to learn more about something asks me how did my analysis.
Correct. But yours is set to 8v. That would let the drone try and fly down to 2.6v/cell. Your Lipo would have been destroyed at that point. I should clarify that I posted the voltage in Volts per cell, not the total voltage. I tend to work that way because it doesn’t matter if your using 3S, 4S or 6S, the process is the same.
Others may have different opinions but for an arming voltage I would suggest something above 3.7v/cell, (11.1V on a 3S battery) Even that is low but it let’s me do some quick checks and ground testing without too much trouble. Maybe set it even higher if you’re unsure, like 3.9 v/cell (11.7v on a 3S.) You can still fly below this voltage, BATT_ARM_VOLT will only stop you from arming.
Because I’m the type of person that stares at the battery voltage as he’s flying I’m actually a little lazy with by battery failsafes because I know I’m paranoid about it. If you are the type to drive around with the low fuel light on for days at a time then you might want to set the battery failsafes and warnings higher so you don’t get caught out.
I would check that. A full 3S battery is 12.6v. There may be a rounding error, or something lost in translation but If your motors can’t handle 3S then they are too small, or poor quality, or just intended for something else.
That’s odd because I’ve been looking for different lipo batteries and all 3s are 11.1v.
Unless I have to charge it all the way to 12.6v.
Here’s a quick primer: Lithium Polymer Etiquette: a Comprehensive Guide to Working With LiPo : 9 Steps (with Pictures) - Instructables
LiPo battery cell voltages:
- 4.2v is fully charged
- 3.7v is nominal charge. Think of this as a safe resting or storage voltage. You can take this up to 3.8v.
- 3.5v is minimum safe voltage for good battery health. With many quads, assuming the battery is specd correctly, if you fly it down to 3.5v it will recover to 3.7v after you take the load off and check the cells.
It’s just the way they sell batteries, they list them by the nominal voltage of 3.7 but you need to charge it to 4.2.
I see. Thanks for the information.
The motors I’m using are 920kv. Props are 10’.
Although, the seller suggested using a 3s battery.
I had a 4s before when I first bought all the components, but never got to use it (I returned it), thinking it would damage the motors for excessive power.
Hard to say. I have 920Kv motors with 10" props and no issues with 4S. Depends on the motor/ESC/prop. Some people are able to make that analysis in their head but I’m not smart enough. Sites like ecalc.ch can help you figure out what to use. A subscription will cost a couple of bucks but if you’re making buying decisions you’ll save the money right away.
1 Like
I guess I should have specified a bit more. I will mostly be using the drone for autonomous flight.
In that case, would the drone stabilize and hover itself compared to me who would have to control the pitch/roll/raw?
The drone will fly similar to Loiter mode when running a mission. You should test and tune in Stabilise and Alt Hold mode, and then Loiter. These would be my preferred modes.
Get everything working perfectly before starting with auto missions.
1 Like
Yes, I have looked at that. Thanks for the link because I couldn’t find it.
By the way, I’m having this problem now. Motor 1 (top right - CCW) keeps slowing down while the others are spinning fast. I can put the throttle at 30% and the others increases in speed while motor 1 starts to slow down.
I’ve also noticed that when I leave the throttle (let’s say at 30%) the three others will gradually start spinning faster by themselves while motor 1 decreases (I assume is to keep itself stable).
Okay, what in the world would it says that I have 1-12 motors?
That is a good point. However, I just started to get more issues. One motor is slowing down while the other three are at a constant speed (similar speed for all three) when the throttle is at the center. I posted the bin log file in my previous reply.
Motors are working fine now after doing several testing/calibration.
Although, I did two separate tests outside. One with Alt Hold and the other in Stabalize. For some reason, the drone after I throttle up started to lose power and dropped to the ground even after I tried pushing the throttle near full it didn’t take off.
Sounds like a battery issue
I was thinking that. The battery voltage was around 10 at that time. I charged it to 12v and the drone did take off (it was still doing the up and down by itself).
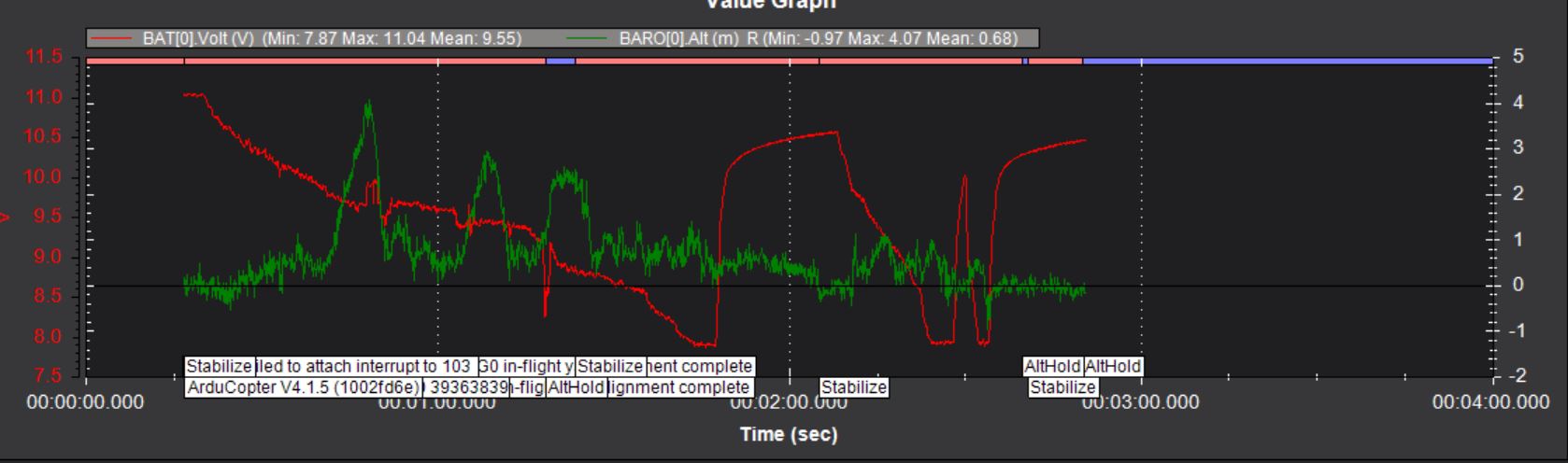
I’m new to drones and mission planners, I just forgot about this. When I charged the battery it said that it was around 10v not that low (~7v). So, I guess that makes more sense.
10V is already depleted. Most would set Battery Failsafe action higher than that. Just a few posts up there was some good advice about minimum cell voltage for good battery health.
3 Likes
And that battery is most likely going to puff soon after being treated like that. Use it for testing, but not for flying missions.
You should really read what Allister posted here:
1 Like