Hey,
I have an issue with my drone every time I am switching from Alt hold to stabilise at the start of the flight the drone “jumps” into the air
Later in the flight this doesn’t seem to be an issue.
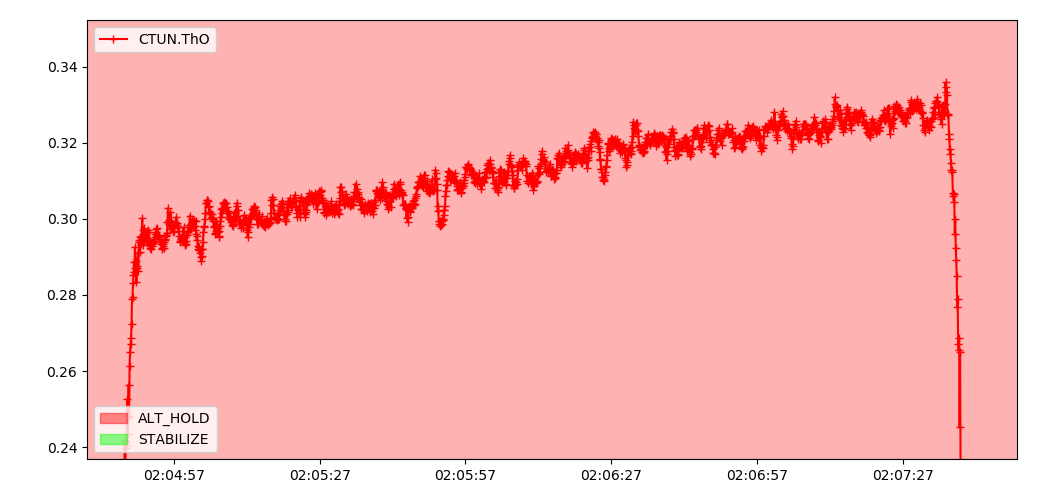
I think the issue is that the CTUN.ThO keep raising even though the drone is keeping the same altitude and the drone learns (MOT_HOVER_LEARN is set to 2) the thrust hover of the end of the flight.
I thought that the Throttle output is RPM command but this is apparently not the case. Is there somethin’ wrong with my setup / calibrations?
I’m using DSHOT for my ESC commands.
Hard to say without a log, but here’s some guesses:
Your battery is weak and over the course of the flight the FC needs to demand more because of the voltage drop. You might want to look at setting up voltage compensation if you have proper voltage and current monitoring.
In Alt-hold the drone should maintain altitude at centre throttle position, however in stabilized it’s up to you to set that position. If your quad is well powered you may hover in stabilized below the centre throttle, causing the jump when you switch modes.
My battery does get pretty weak towards the end of the flight so I’ll check the voltage calibration issue.
I think i might be a bit confused about the collective output.
The command to the ESC is not RPM? And that the ESC job is to maintain RPM (In that case, the ESC handles voltage issues).
I thought in stabilise the MOT_HOVER_LEARN functionality is suppose to set my hover to be the middle of the stick.
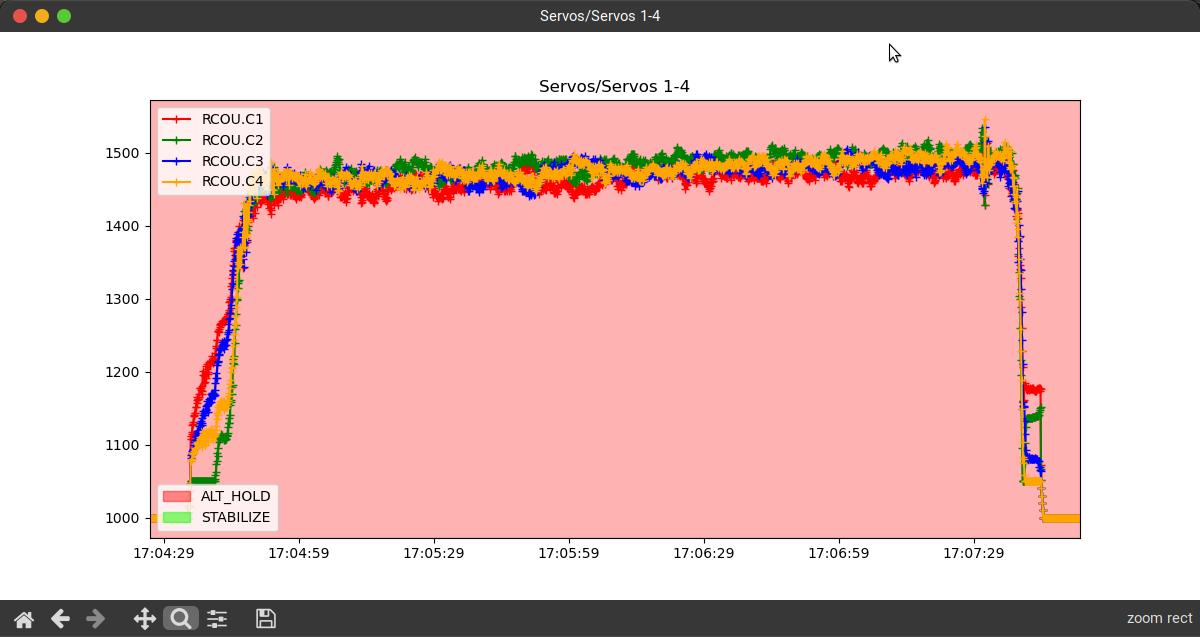
I don’t see any voltage or current data in flight 99 so it’s hard to check that out. But the FC outputs to all the motors are slowly increasing over the duration of the flight.
The speed of the motor is a function of the input voltage to the ESC. If the battery voltage is dropping significantly enough the FC will need to respond with an increased signal to the ESC to maintain the same thrust.
No. It learns in an assisted mode. AltHold, Loiter.
From the Wiki:
The MOT_THST_HOVER value will slowly move towards the average motor output whenever the vehicle is holding a steady hover in non-manual flight modes (i.e. all modes except Stabilize and Acro).
And of course as @Allister alludes to these can’t work if there is no battery logging:
MOT_BAT_VOLT_MAX,16.8
MOT_BAT_VOLT_MIN,13.2