I wonder if anyone can help me figure out why my Drone crashes once every 10 flights or so ??? The Drone flys great, I am very happy with it !!! It has long flight times and it flys at around 40 % power. The problem is that every once in a while, it just seems to loose the ability to fly and crashes. It makes an attempt to stay flying, it does not go totally upside down or anything, but becomes very unstable in pitch, roll and yaw. This has happened with 2 different firmware versions now, so I doubt this is the fault of ArduPilot. Does anyone have any idea what may be causing this ??? I am attaching the .bin link to this post.
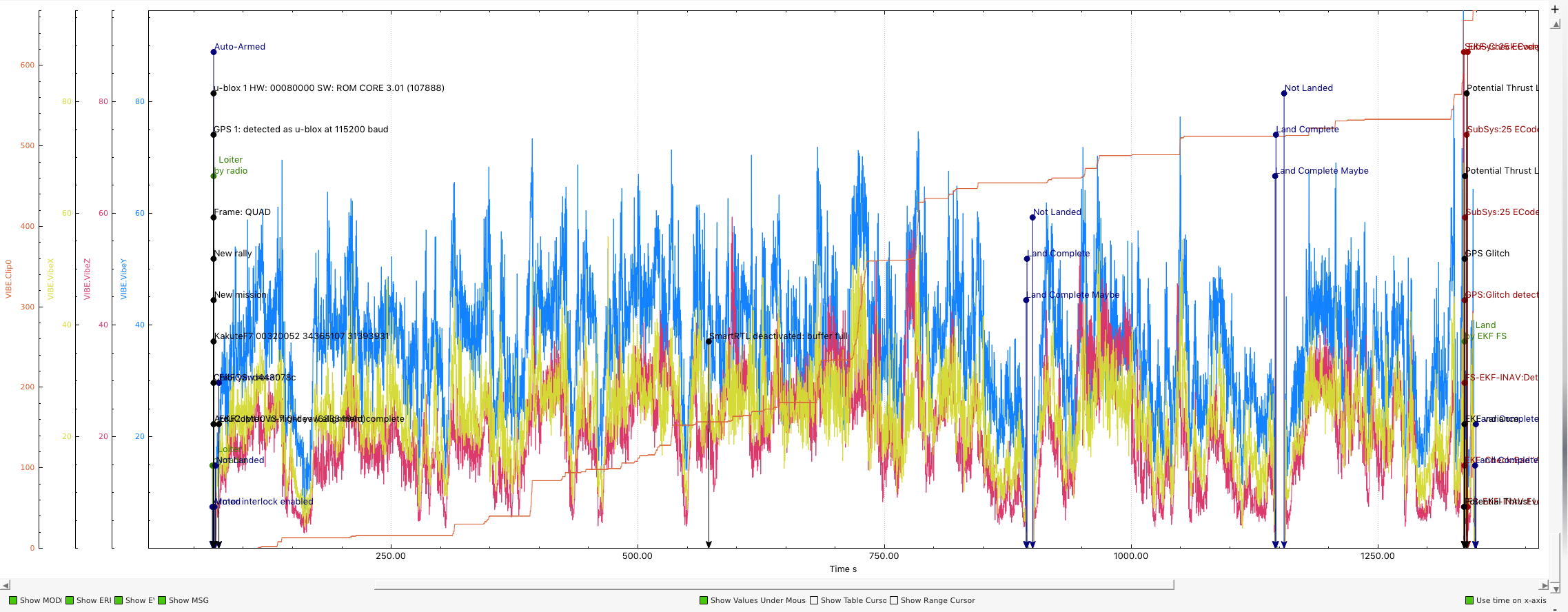
Thank you for the analysis ! I have the flight controller ( Kakute F7 ) on rubber mounts, so that may explain why the IMU data is not adding up. I did the autotune, but that was before the last firmware update, so I will run it again. I will also pay closer attention to balancing the props !!!
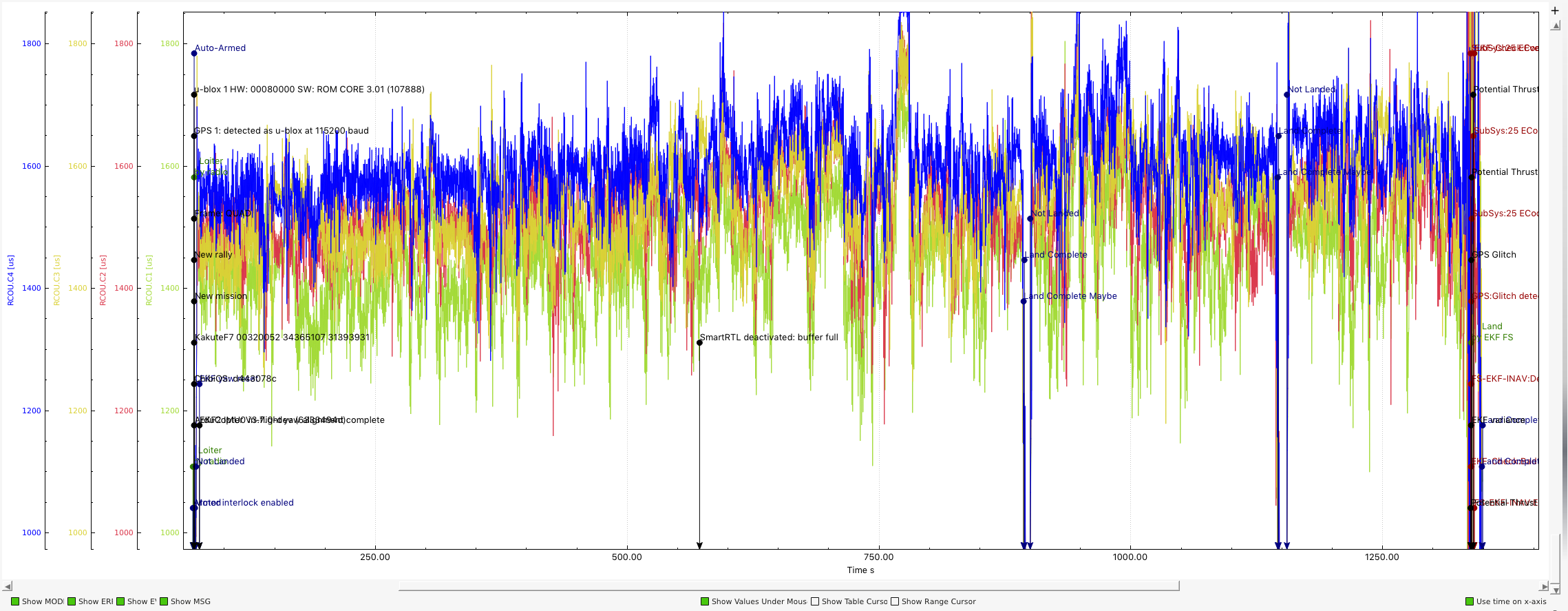
The frame is incredibly well balanced, I would be willing to bet better balanced than 90 % of the copters out there. I paid very close attention to this when doing the build. Which brings a question, is it possible that Motor 4 is defective ??? I wonder if I should replace it ???