I am building a fairly large quad copter and i have been having some issues.
I want to start out by saying that i am new to drones and RC equipment because this is only my second drone. First one being a racing drone.
The drone That i am building is fairly large having a wingspan of about a meter.
The problem that i am encountering is that my drone acts like the trims are way out. When i try to trim the copter with the trim buttons located near the joysticks on the remote they make little difference to the copter behavior.
When i arm the copter and increase throttle, the copter starts tipping to the left and will then fall over. its like what you would get if only your two right motors were spinning.
I am using mission planner to set up my quad because it has a RCTimer Arduflyer 2.5 flight controller.
I noticed that the Rc transmitter’s joystick center values are all around 1460. I don’t know if it is okay to have your values that far out from 1500.
I will include a picture of the mission planner page where it show the joystick values.
I think it s terrible idea to use an obsolete Flight Controller for a large craft. Or any craft for that matter. But what you describe is usually due to motor order or motor direction being wrong. And, you never use Transmitter Trim on a multirotor for any reason. Center them and perform a proper accelerometer calibration. But 1st replace the Flight Controller with one that will run the latest version of Arducopter.
What flight controller would you recommend for this multirotor?
I have tried doing a accelerometer calibration multiple time with no success.
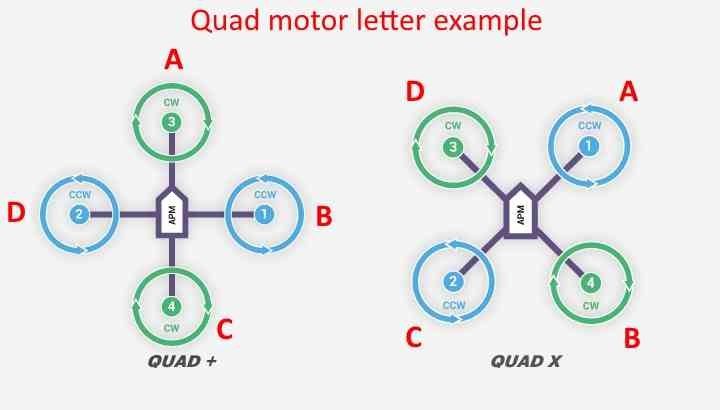
Also the i am 99 percent sure that motor order and direction are correct.
I am beginning to suspect it might be a Hardware issue but i don’t know what the best course of action would be to check if it is.
I actually got the drone from a friend who had it flying a some point but was having issues with it.
Just researching different flight controllers at the moment and i am wondering if the Ardupilot APM 2.8 Flight Controller Board is any good.
I know that the current flight controller that i have can’t use the current arducopter version because it is outdated.
I am wondering if the Ardupilot APM 2.8 Flight Controller Board is able to use the current version of arducopter.
Anyway flip wise as said it’s normally incorrect motor order, but I’ve had it when I picked the wrong frame or put the props on the wrong way round as well.
I Will have to double check again that the motor order is correct.
Would a faulty esc or motor cause this issue because i think that might be the issue?
Also is their a difference between the OUYAWEI Pixhawk PX4 2.4.8 and the HobbyPower Pixhawk PX4 2.4.8? The OUYAWEI is about 20 bucks cheaper on Amazon.