I’m having a problem with my drone where when the springboard starts in mission planner it jumps and breaks its propellers and it can’t fly since I’m using a pixhawk
It was flying perfectly in my first time
When I wanted it to fly again in the second time it flipped and couldn’t takeoff
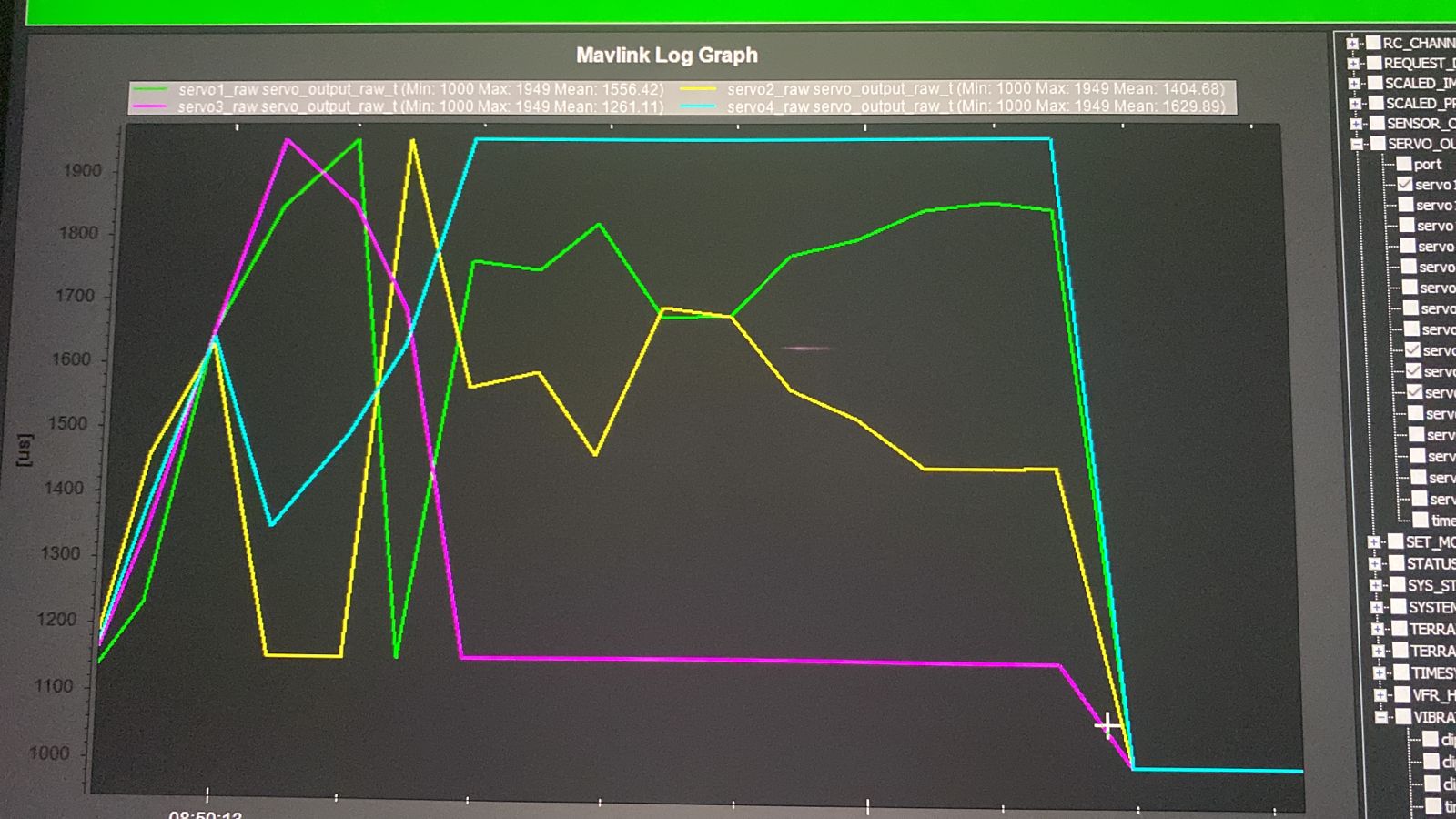
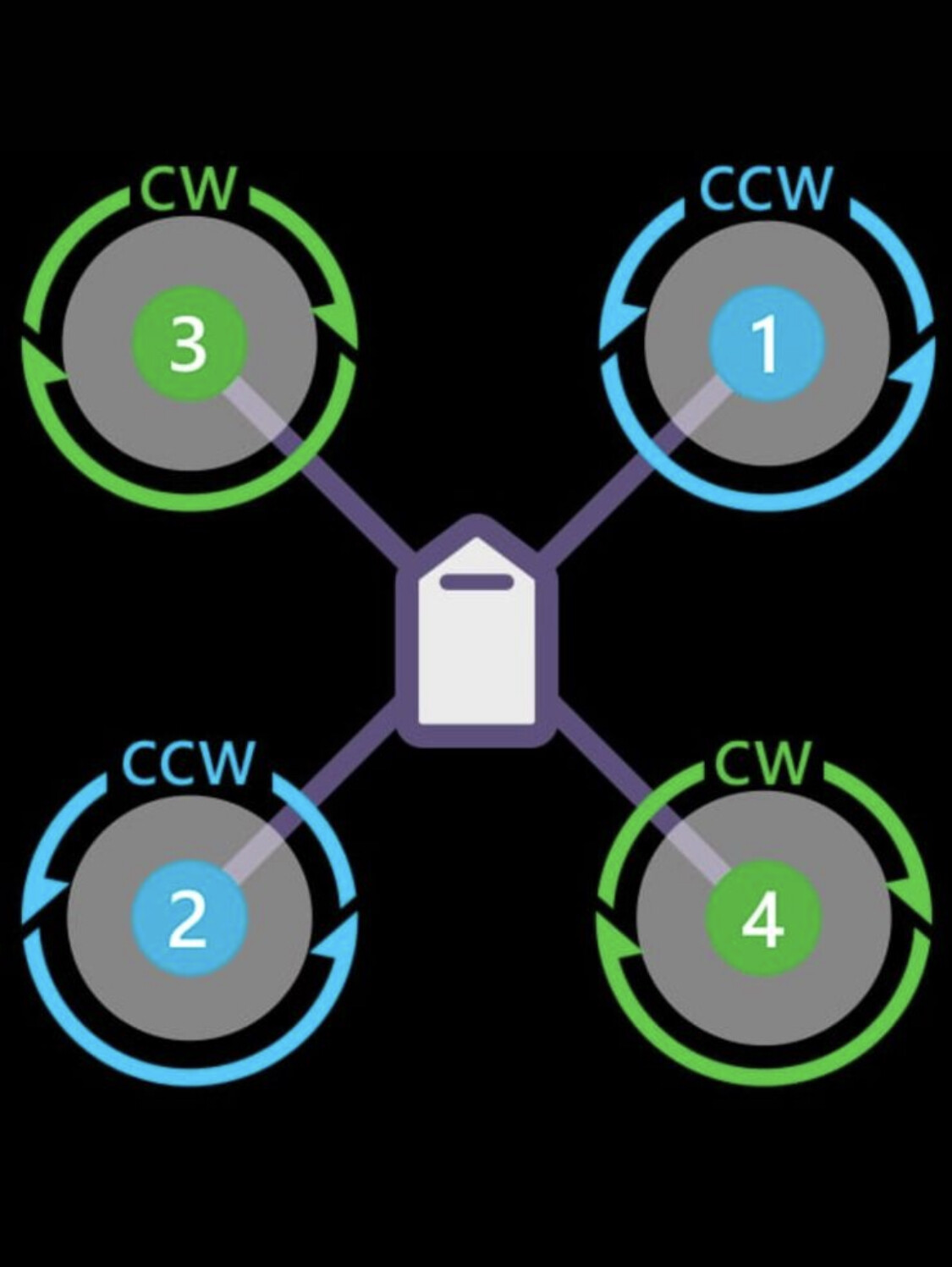
I reviewed the Log graph and foundout the servo3 and servo4 doesn’t work properly
Upload the .bin log to a filesharing service, then post a link to it here.
One trick is usually the transmitter pitch stick is backwards compared to what Arducopter expects, and you would reverse this in the transmitter. So taking off can actually be OK but if you go to input any pitch the copter goes the wrong way and you put in more pitch and it pitches more the wrong way…
Go into the RC calibration screen.
for roll, throttle and yaw channels, the green bars should move in the same direction as the transmitter’s physical sticks
for pitch, the green bar should move in the opposite direction to the transmitter’s physical stick
OK, the .bin log file might tell the story.
The problem with Auto takeoffs in missions can be : the first waypoint is some distance away so during takeoff the copter is attempting to navigate laterally to the first waypoint but the required pitch angle and landing gear touching the ground causes it to tip over.
Also peoples heads and vehicles can get in the way.
It is best to put a waypoint directly above the takeoff position so the copter will takeoff vertically as much as practical.
Also best to have FENCE_ENABLE,1 to ensure there’s a good 3D Fix and Home can be set before you can arm in any mode.
You can also set:
WP_NAVALT_MIN,2
and the copter wont try an navigate in any horizontal direction until it reaches the set altitude.
The problem is it wont fight against wind, so if you set the WP_NAVALT_MIN too high the copter could drift a lot before reaching the required altitude.