Hello Experts,
I was flying in alt hold mode and suddenly the drone flipped 180geg after 2min of takeoff and crashed, the flip was full 180deg. I have verified there is no physical damage like cold soldering or loose connection, even in the log, there is no sign of physical damage. strange is FC has also not recorded it as a crash. Can anyone help me to find the reason of crash.
I am attaching the log file, for a reference, Thank You
Log_file
When a log ends abruptly like that it’s usually a power problem. You have no Battery Logging, bad idea.
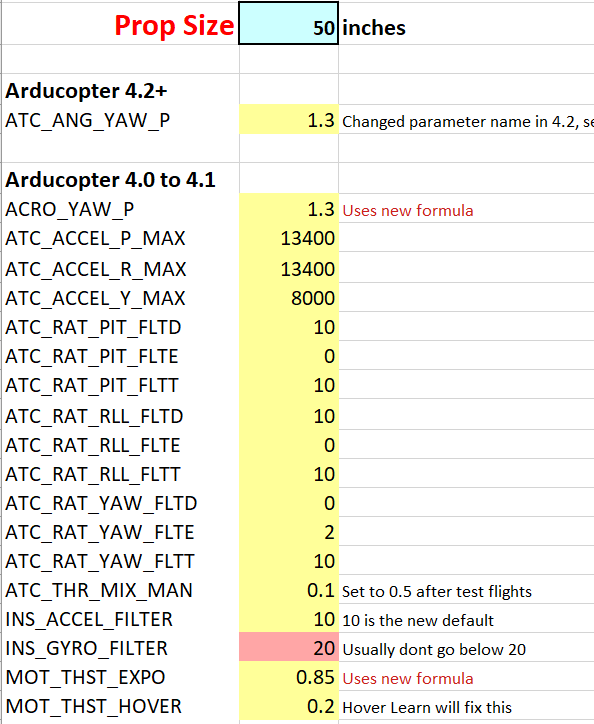
Are you flying a 50" propeller and above Hexa drone? I am curious how big is your drone?
How do you derive the ATC_ACCEL_x_MAX,12500?
MOT_BAT_VOLT_MAX,100.8/4.2 = 24S battery?
MOT_BAT_VOLT_MIN,79.2
any reason why you use GPS for height sensing?
EK3_SRCx_POSZ,3 (GPS)
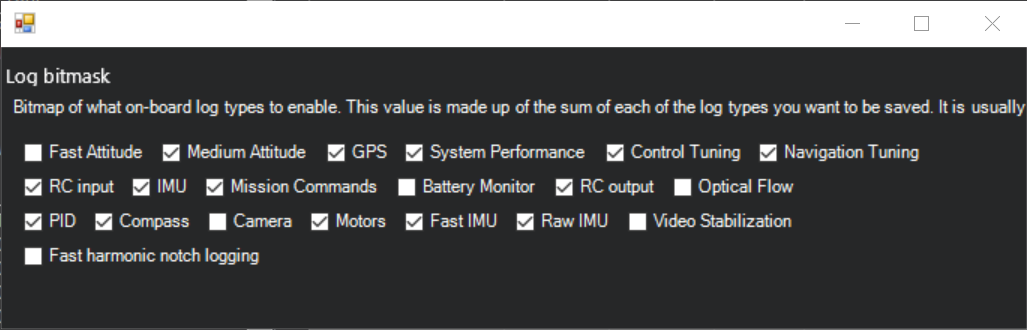
LOG_DISARMED,0 when not needed to make the log file smaller.
LOG_FILE_DSRMROT, 1 for each arm to disarm flight.
LOG_FILE_RATEMAX, 0 suggests keeping to default first
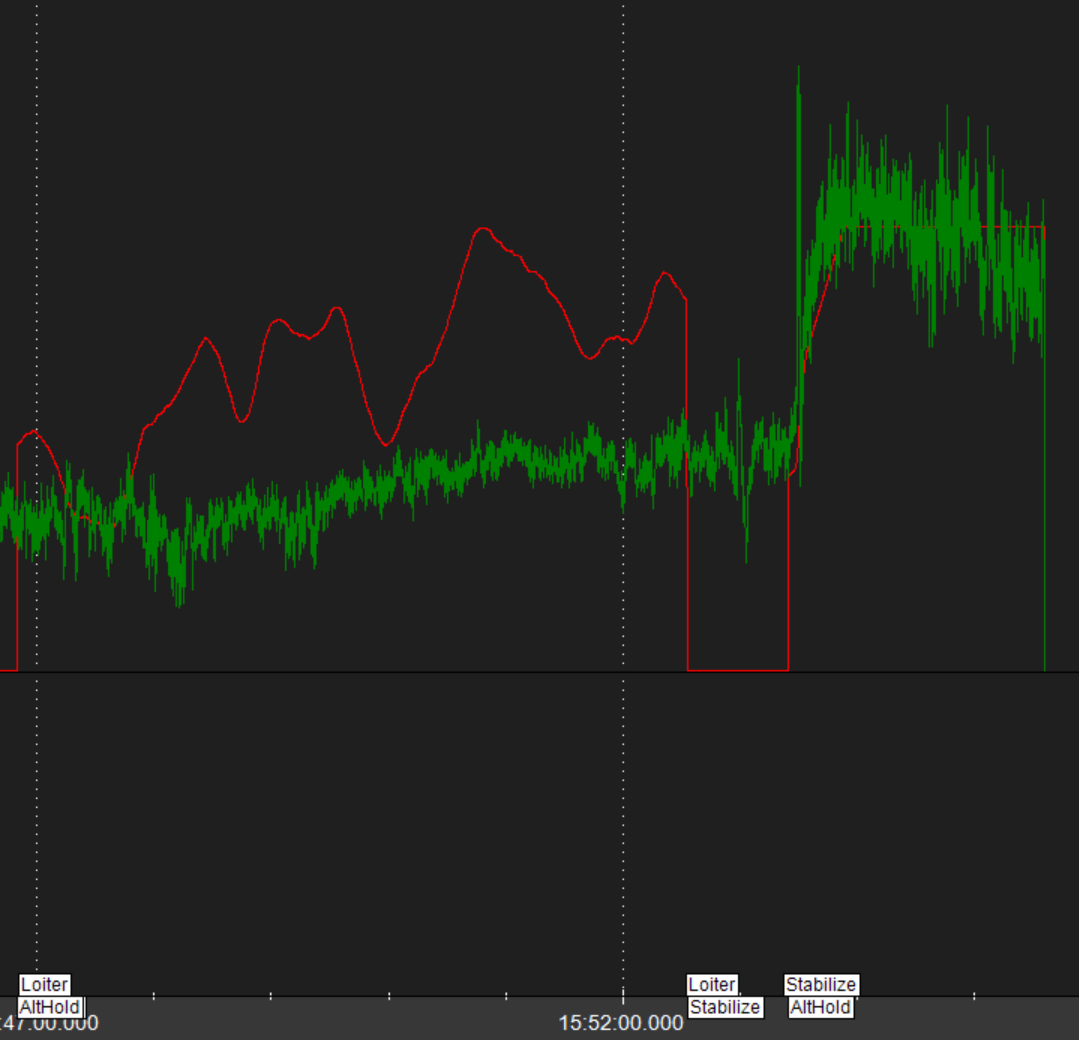
15.46.50 - 15.52.35, got height recorded but no motor data. hmmm…
Which flight controller unit are you using?

Suggest removing Fast & RAW IMU for Harmonic Notch filter data capture.
Refer to here for guide.
yes, our assessment was the same, but as per the ardupilot document, it could be a software glitch too,… Is there any way we can verify that…
Hii @Jai.GAY, thank you for your reply, your assessments are very close to my build, ![]()
About ATC_ACCEL_X_Max, to be honest, I am still figuring it out,
my barometer is giving slightly inaccurate readings so we are using GPS for height.
I am using CubeOrange
It would be a great help if you can study the log and suggest some changes.
Thank you
Then you probably should thinking of downward facing rangefinder for height.
I may not able to further provide help, the maximum wheelbase drone I am involved is 1.88m drone, 32" propeller hexa and octo drone.
Probably not. Enable battery logging. Must be a problem as you have it disabled in the pre-arm mask too. Fix that.