Hi all,
We have been flying with a companion computer in guided no GPS, and when we switched to the ALT HOLD drone, we decided to flip 360 degrees.
FC: Kakute H7
Arducopter: 4.4.4
Attaching logs (link drive), maybe could someone help ?
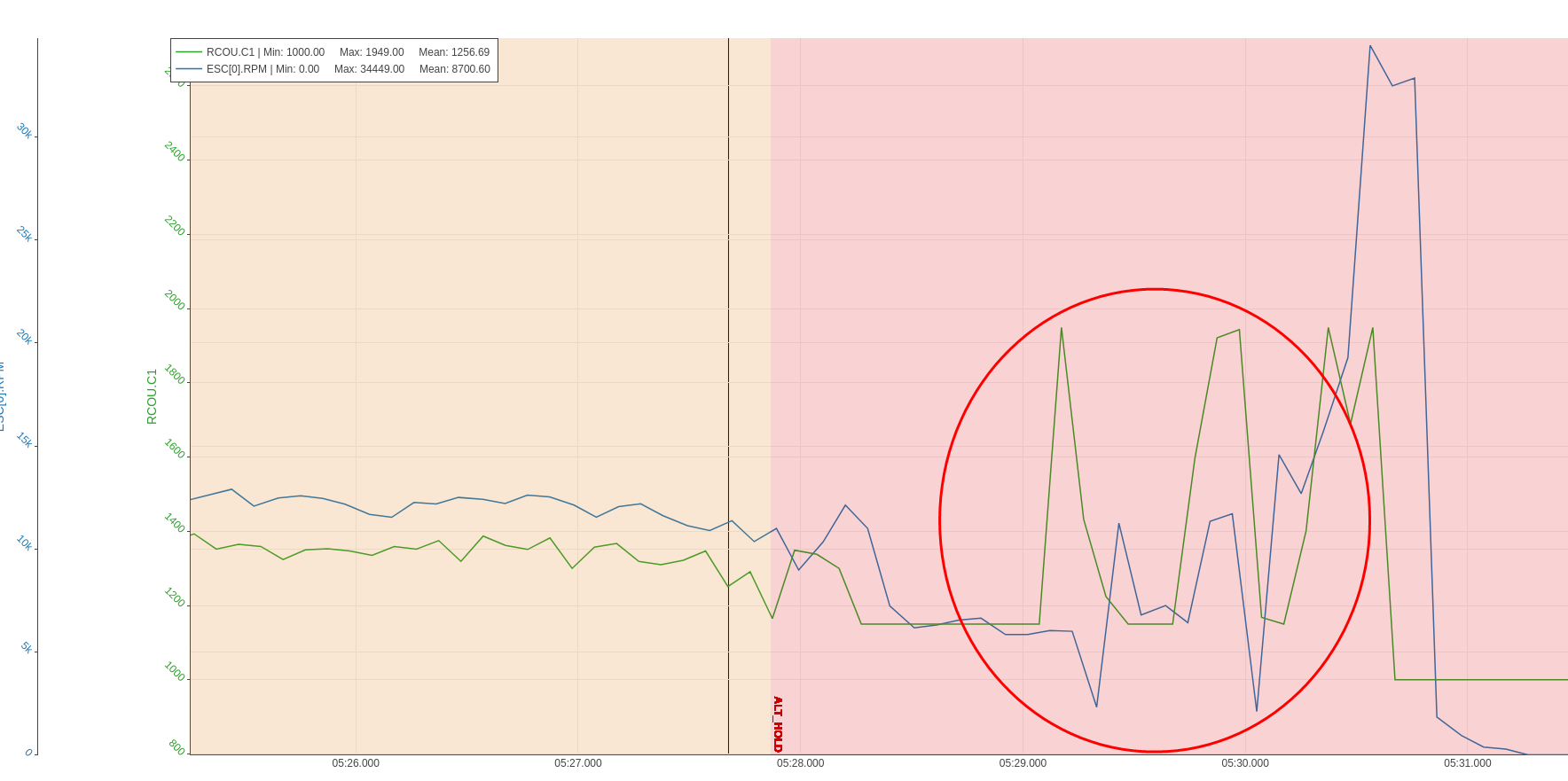
That looks really wired, according to the log the drone started oscillating out of nowhere.
I would recommend updating to the current version of Ardupilot. If you can then reproduce the issue in a safe environment with imu logging enabled that could help identify the issue though any flight with more logging could help.
2 Likes
Your compass is disabled, why?
We use only IMU+BARO and our visual feedback from the camera.
You mean this param? Complete Parameter List — Copter documentation
So its yaw estimation comes from the IMU? Wouldn’t be surprised if there’s the issue.
Yes, primary only should be enough to check for high vibrations and possible disturbances.
Do you have visual position estimation? Why not feed that to the autopilot?
we use it only duirng GUIDED NO GPS mode, so during normal flight this is not working.
We have not seen such issue before though. We have flown without compass for long and we haven’t had a flip during alt hold. Thus I am curious
Ive found another issue with the drone.
We have calibrated it again, checked the logs on the table and then took it for a test flight.
During the testflight we initiated GUIDED no GPS mode and controller the vehicle by ourselves, but every time we switch from GUIDED NO GPS (GNGP) to ALTHOLD - the drone went up by 100-200 meters, and I could not stop it in alt hold, only in stab, and then it resulted in a wild crash.
Does GNGP affect EKF estimation?
Attaching log drive