Log attached. I was attempting to do an autotune - landed a few times to reposition things. I was in alt hold, getting ready to flip on autotune and noticed it landed. Didn’t really think anything of it. Took it up again and few seconds later motors shut off and it fell. Looked through the logs and can see where the Z acceleration spiked (the drop) near the end but can’t see anything obvious as to why. Would appreciate any eyes on this.
log
The pitch and roll performance look good for a machine that you’re about to tune. Vibration levels look okay, but the landings must have been rough because they were giving significant clipping each time.
Battery sag seemed on the high side. I’m assuming 6s, so the voltage never dropped below 3.8, but it went there pretty fast given the length of the flight. Your current meter is only reporting 1.2amps and I’m going to guess that’s not correct. You should probably sort that out.
Something is going on with the motors:
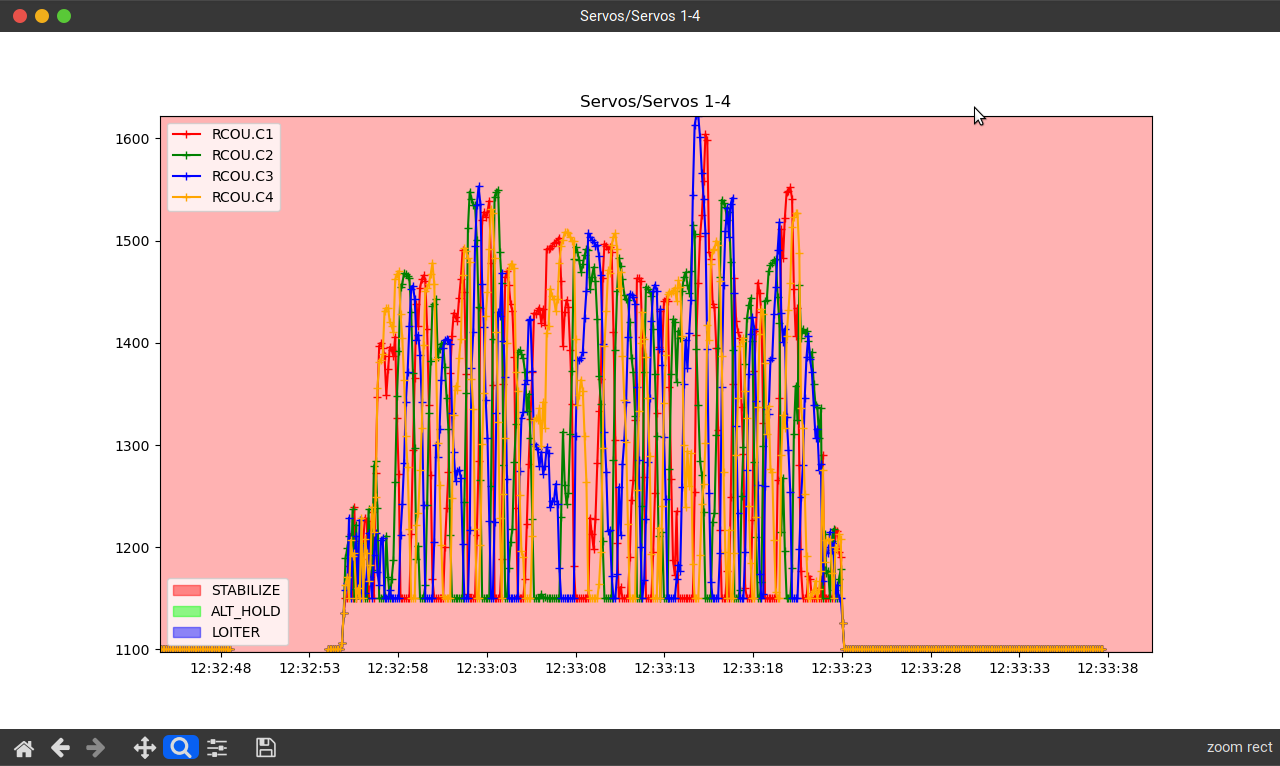
I don’t even know what to make of that. Are all the ESCs set up correctly? That graph is so odd I’m not convinced that I’m not making a mistake with Mavexplorer. I’m interested to know what others have to say.
It’s a tmotor v45a 4 in 1 esc, a holybro pm06 for battery monitoring, and tmotor f90 motors. Using Dshot300 esc protocol. Just using esc out from the esc and pm06 is providing battery monitoring (kinda hacky).
Yeah the landings I did (controlled) were a bit rough, which explains what you saw.
The pitch and roll controller outputs are oscillating badly:
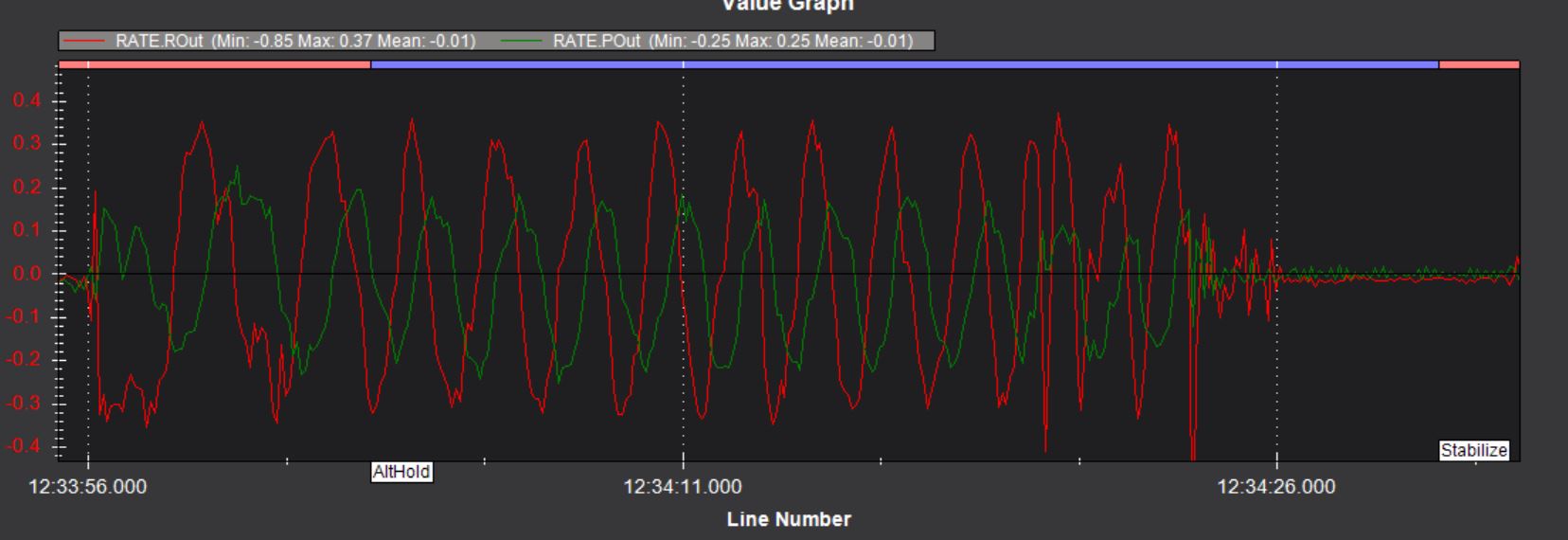
As are the motor outputs as @Allister pointed out. Start by dropping the Rate Pitch and Roll P&I values and follow the tuning guide to set these:
PSC_ACCZ_I,1
PSC_ACCZ_P,0.5
You should also configure the Dynamic Notch Filter.
Think it could be because of a wobbly frame? I’m using a carbon fiber unibody …might need a thicker sheet?
I would try what I suggested and see where you end up. The standard procedure is:
Configure Initial Tuning Parameters
Configure the Dynamic Notch Filter.
Perform Auto Tune.
You can tune manually rather than Auto Tune if you like if you have a good handle on that.
1 Like
Thank you for the info.
I might be wrong in my recollection, but I’m pretty sure the throttle went to 0 or the motors otherwise turned off. Would tuning or the lack there of cause that?
Not sure what you are suggesting but the throttle is not at zero, the Motor Outputs are oscillating from a bad tune.

Throttle command signal on the 2nd Y axis.
To be fair a craft with a high thrust/weight can be a bit more challenging to tune in this regard.
It’s - 1.4Kg drone. Think the motors are too much for if? I tried to shoot for 50% motor output for initial lift.
No, but you could use a higher capacity battery for potentially an easier time tuning. And more flight time obviously.
Update on this - I’m fairly certain the erratic RCOU numbers was due to setting the SERVO_RATE to 200. When I changed it back to 50, those numbers looks more normal (no wild swings). I lowed the PIDs a bit and removed the oscillation and changed how things were wired so the battery monitor was aware of all the power consumption - I wired the battery monitor to feed off after the ESC power, so it was missing all of that.