-1404 motors 4600kv
-gemfan floppy proppy (4in)(wanting to use gemfan lr 5in)
-2s lithium ion battery pack
-flywoo 13a blheli_s esc dshot 600
-walksnail avatar lite system
-I flight blitz M10 gps
-matek optical flow and range finder
also a speedy xaio board with VL53L1X for AVOID
ELRS system
i am facing an issue where the drone drops out of the sky after a few minutes of flight
my walksnail temprature reches 109deg
and my esc gets quite hot
also this stetup is not for performance or mad manuvers, just for very slow and efficent fight
any suggetions (below is the log file and the ardupilot params)
The craft is not flying in that log. But from the parameter file you have done no tuning. Default PID’s, and some other parameters, are not suitable for a 4"craft. Make these changes and provide a log of a simple hover in AltHold:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.56
PSC_ACCZ_P,0.28
You will likely have to also drop the Rate PID’s significantly. But this will be clear from the log.
Looking better but noise is still present. Change these:
ATC_ANG_PIT_P,9
ATC_ANG_RLL_P,9
ATC_ANG_YAW_P,6
ATC_RAT_PIT_D,0.0015 (and same for Roll)
ATC_RAT_PIT_I,0.05 (and same for Roll)
ATC_RAT_PIT_P,0.05 (and same for Roll)
I just noticed you have EK2 enabled. Disable that and make another hover flight.
I would forget about FlowHold until the craft is tuned. After that read thru this and play around with it then: Flowhold
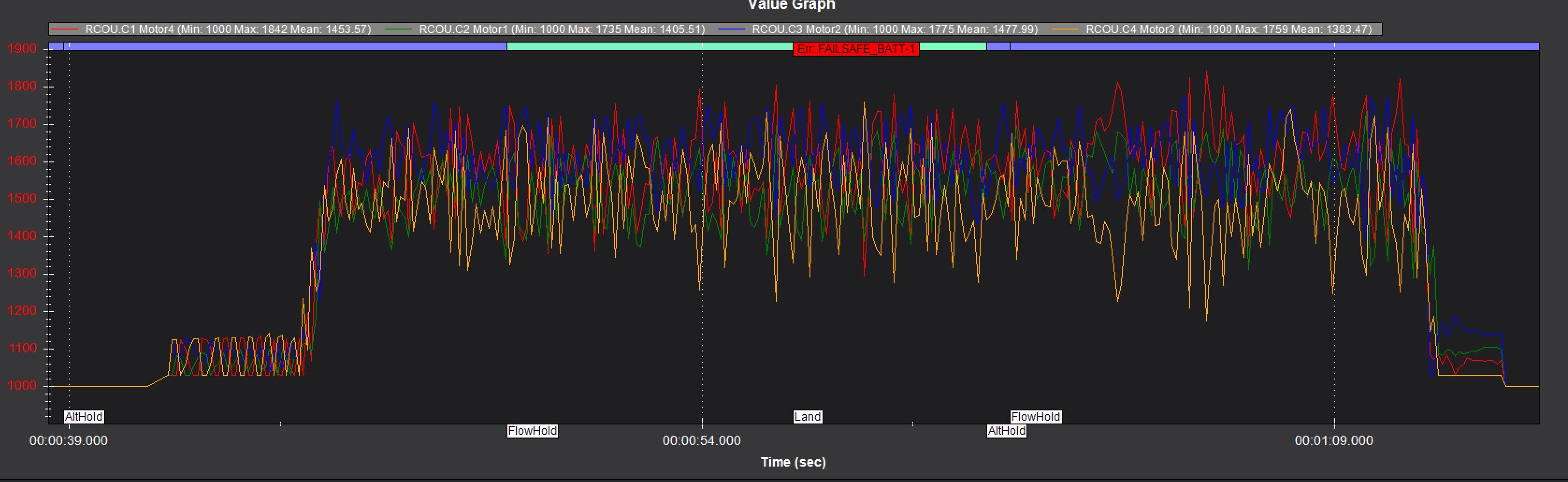
The basic tune looks OK, good enough to try an Auto Tune anyway. You do have a mechanical Yaw bias on this craft. This is usually from twisted motor mounts or arms. Note the difference between the CW and CCW outputs here: