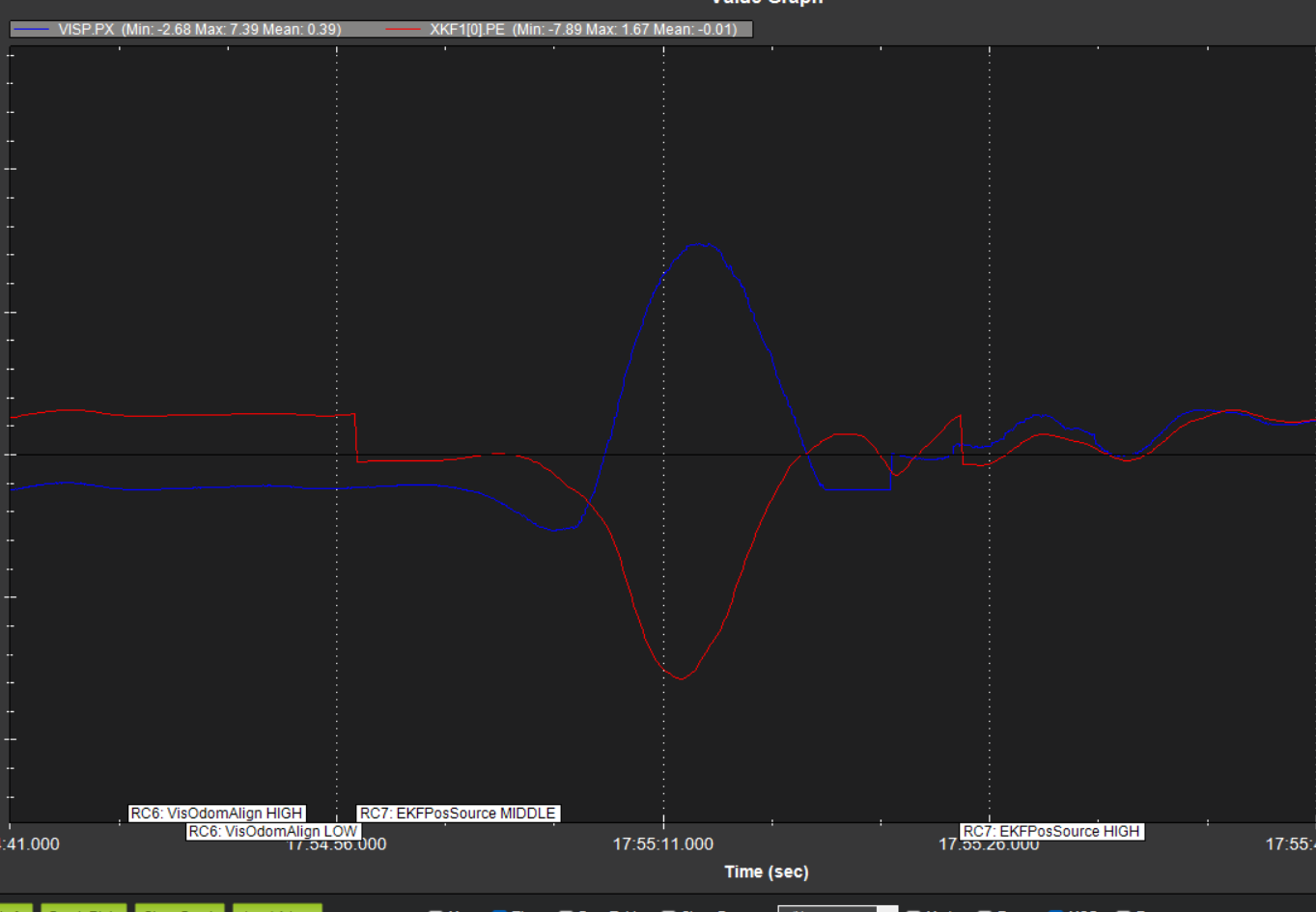
Flying the drone with Visual Odometry as primary source. After takeoff the drone starts to drift a lot even though there is not EKF variance for velocity/position.
After reviewing the logs, I understood visual odometry data was stable.
Not able to figure out what exactly the problem is
Need help!!!
Could you share a log file and a parameter file?
What kind of environment are you flying in? What physical features or surfaces is the VO tracking?
1 Like
Hi
I cannot share the parameter or log file
I have a question though, is it possible that the drone drifted because the axis of visual odometry(x, y) did not match with the axis of IMU??
You will have to review your config yourself. GPS and Vis Odom weren’t consistent AFAIK.