Hi all
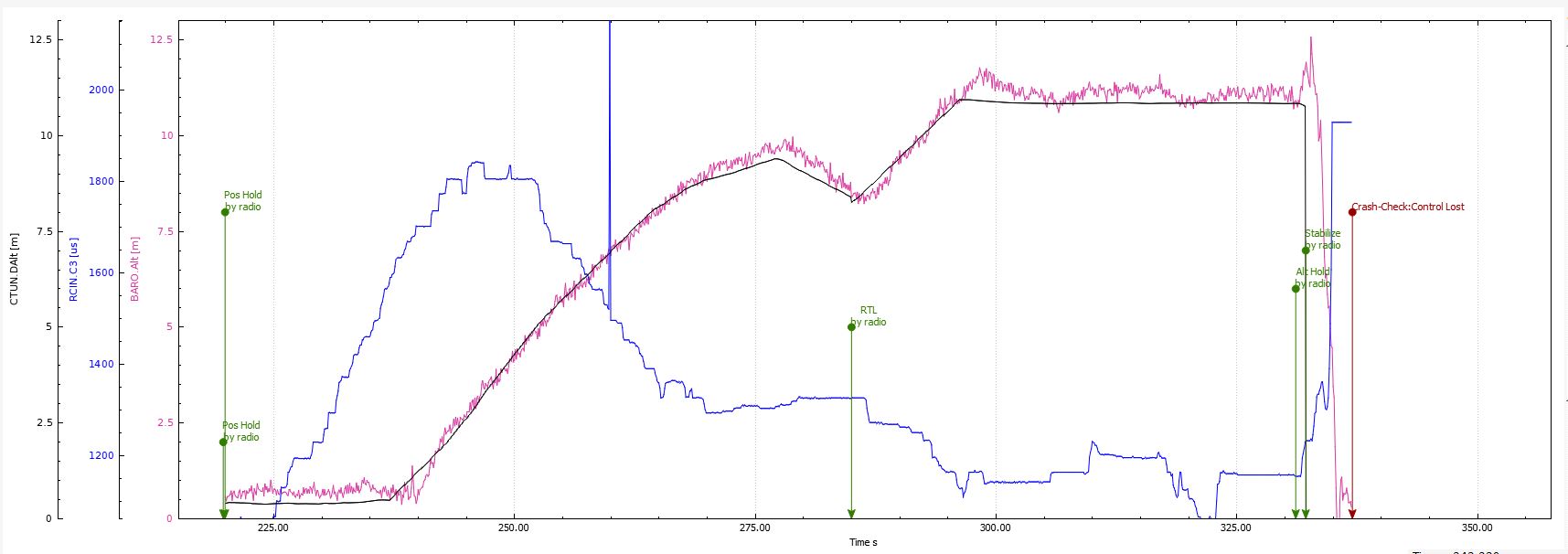
I have a Tarot X6 hexacopter with a pixhawk 4 FC with arducopter 3.6.4. After taking off in position hold mode I couldnt get it down. Pulled down the throttle stick very low(almost the whole way down) but the drone didnt start to descend. When I looked at the log files the ch3in channel decreases to around 1100(minimum is 1060) but the ch3 percent remain at 50-60%. Isnt Ch3 percent suposed to go down as well.
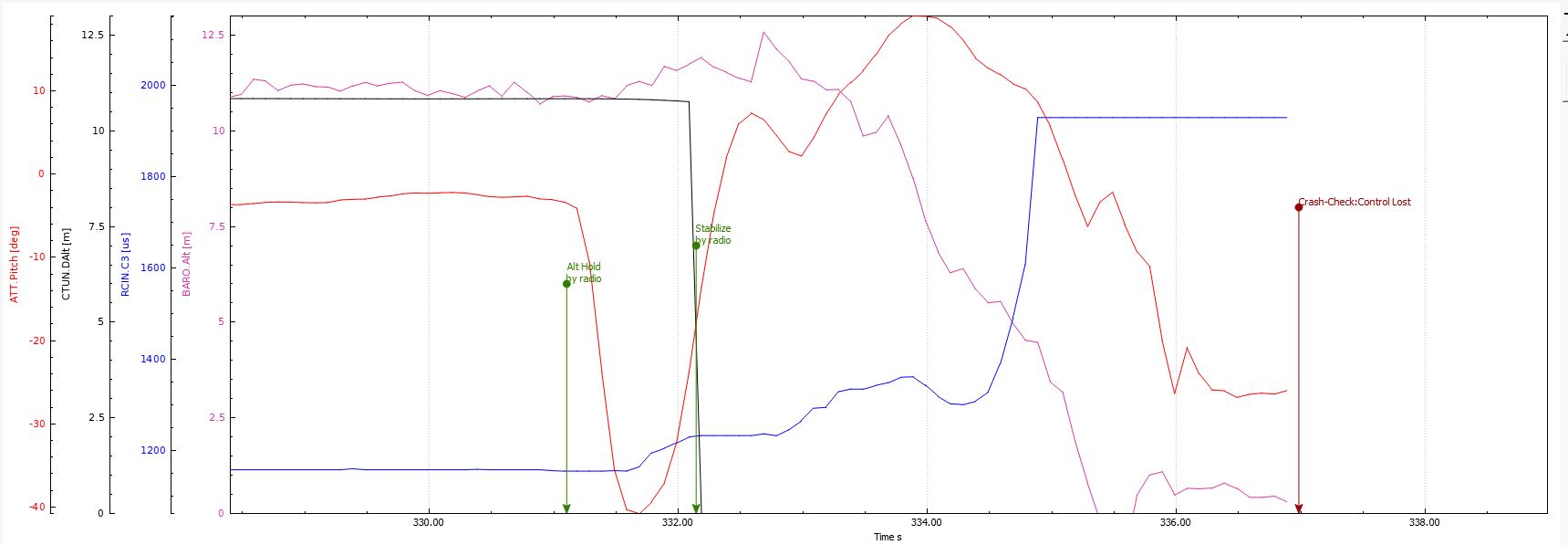
Since it didnt come down, I switched to RTL mode. The drone was supposed to climb upto the RTL_ALT which is 15m, but it only climbed upto 10m. I had set the RTL_FINAL altitude to 0 for it to land but it kept hovering. At this point the throttle stick was still almost down. Then I switched to Stabilise mode (forgot to push the throttle stick up) and the drone crashed. Any reasons as to why this happened. I have attached both the log files.
You have PILOT_TAKOFF_ALT set to 10m so it was ascending to that after you raised the throttle in PosHold. When it achieved 10m it was under control of the throttle which was low and it started to descend normally when you switched to RTL. I’m not sure why it didn’t ascend to RTL_FINAL but desired Alt was ~11m so that’s what it did. When you switched to Stabilize the throttle was low (~1200) so it plummeted to earth as expected. You raised the throttle when the craft was ~5m but too late. It was pitching quite a lot as it was dropping so not enough control to recover when you applied throttle.
I found from this thread that I have a problem with using the APM Planner.
When I open a DF log, I got this error msg : " Unable to create : near integer: syntax error Unable to execute statement".
When I open a .bin file, I got this error msg : “Error execing index :NKT PRIMARY KEY must be unique. nable to fetch row”. Sometimes when I open a DG log , I also got this error msg.
So I update the APM Planner to the current version, and I open the tlog from Sahan whom you replied to his question in this thread, and I got this error msg : “log parsing ended with error”.
My OS is WIN 7 running 64 bit.
I wanted to display the graph which you did to help Sahan in this thread. Pls help.