Hello guys, I need help!
I mounted this drone with the Pixhawk controller and I tried everything and I still couldn’t fly with it, the drone has the scs and engines calibrated and even so it tends to topple when I give power to the accelerator.
Motor order (and maybe spin directions) will be wrong for sure.
Check the motor order diagrams, your Main out 1 goes to ESC and motor 1
Main out 2 goes to ESC and motor 2, and so on.
Arm and just let the motors spin at their minimum to carefully observe their spin directions.
Upon power up and armed, give a very small throttle and check each motor should spin as shown in pic. If you have wired the motors correctly, than each motor should spin the direction as shown in pic.
If they are not spinning in the right direction, you will have to check two things.
The easiest way to make motors spin from counter clock wise to clockwise or vise versa, is by simply swapping the two motor wires going to ESC (Not the middle wire). This change the spinning direction of the motor.
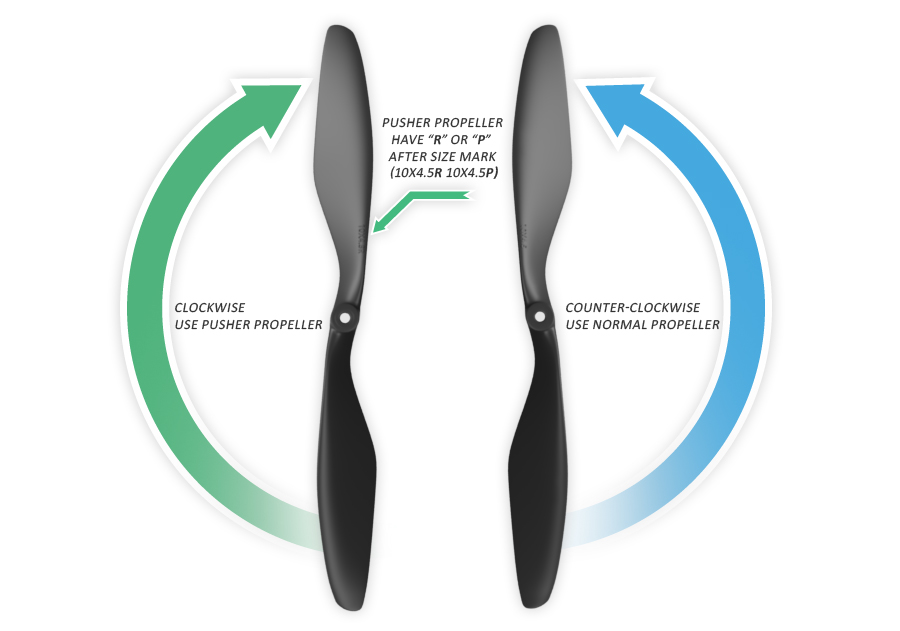
Also, you need to make sure, you are using the correct props. You need two counter clock props and two clock props. Check Image below.
You can reverse the direction of a brushless more by swapping any 2 of the 3 leads from the ESC to the motor. Not sure what you mean by “the 2 motor wires going to the ESC”. ESC configuration software can also be used to reverse a motors direction. This is the easiest way if everything is already wired up. Unless you are making the mistake of using bullet connectors then you can swap 2 easily then wait for them to fail.
The proper way to check Motor Order and direction is with Mission Planners Motor test or ESC configuration software like BLHelisuite if appropriate.
Hello, thanks for the help, but the order of the engines has been checked, and your connection is correct, I have a video that would be very good for you to watch the drone, but I can’t find how to add the video to the forum.
I have done this procedure several times and it is nothing wrong, I am almost sure that some software adjustment is missing, because in one situation I gave a little more power and the drone came out of the ground about 2 meters but totally moving to my right, going to the ground about 5 meters away.
Hello guys, unfortunately the problem that I have when I take off my drone has not yet been solved, it still doesn’t have symmetry in its engines when I give power to fly, it still tends to tip over to the side.
remembering that all the propellers, directions, etc., have already been checked. Esc and calibration calibrations have also been carried out but without success.
please someone who has been through this could help me …
Post a link to a .bin log file of an attempted takeoff. You checked the motor order and direction with Mission Planners Motor test? Sorry to belabor the point but sometimes the order the test is run in is not understood even if there is a note right on the screen explaining it.