Hi guys. I have a Tarot x6 hexarotor drone with a pixhawk 4 FC running 3.6 firmware. While testing the drone it crashed. I have no idea what went wrong. I have attached the logs for reference. Can someone please help me out. Thank you in advance
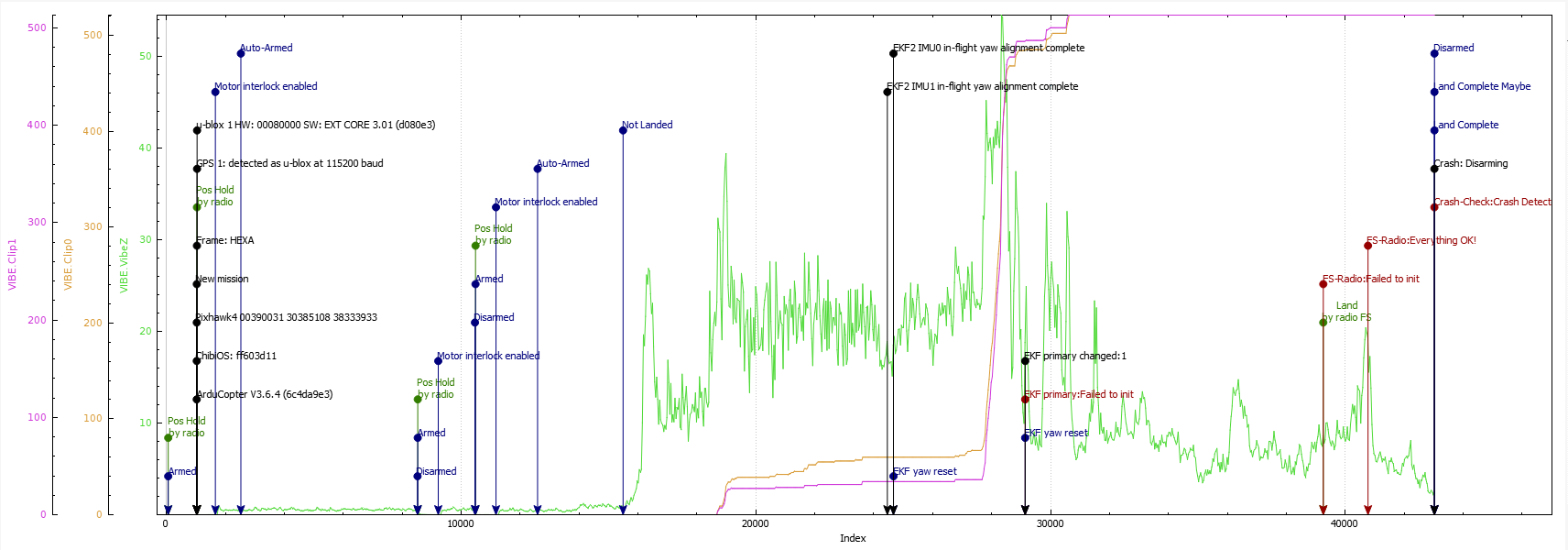
2- it have high z vibration with clipping (high z vibration could affect EKF measurement and i think its the main reason of EKF error and crash of your copter )
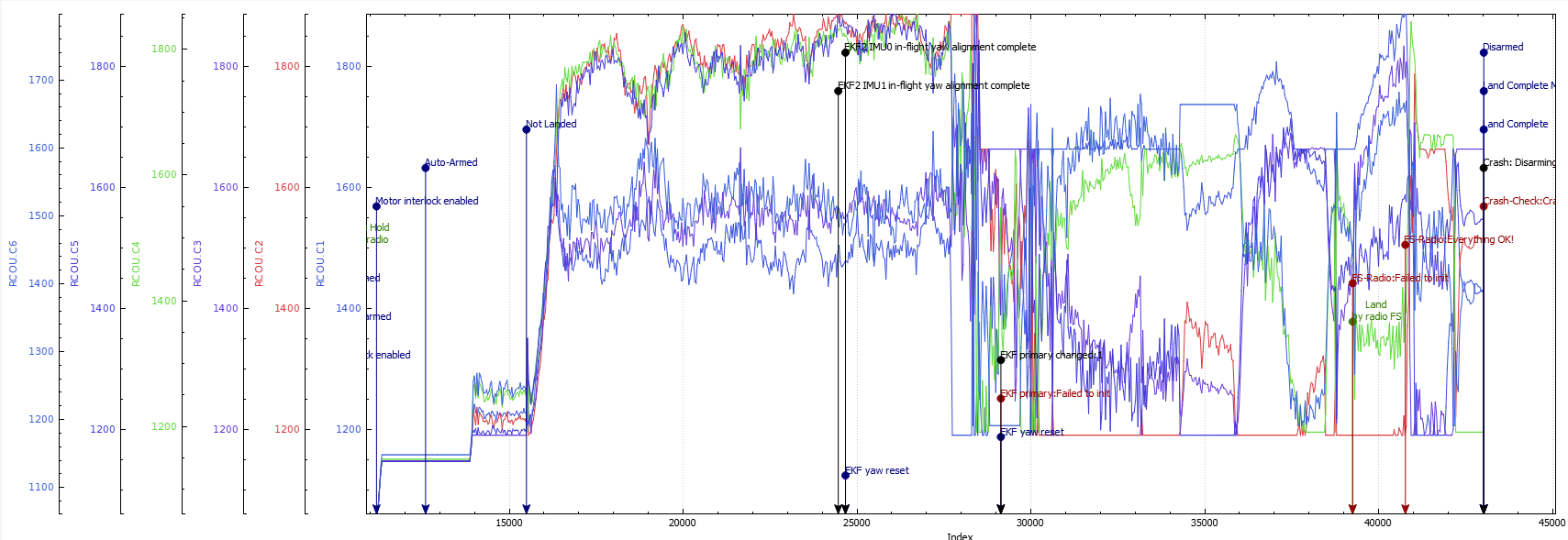
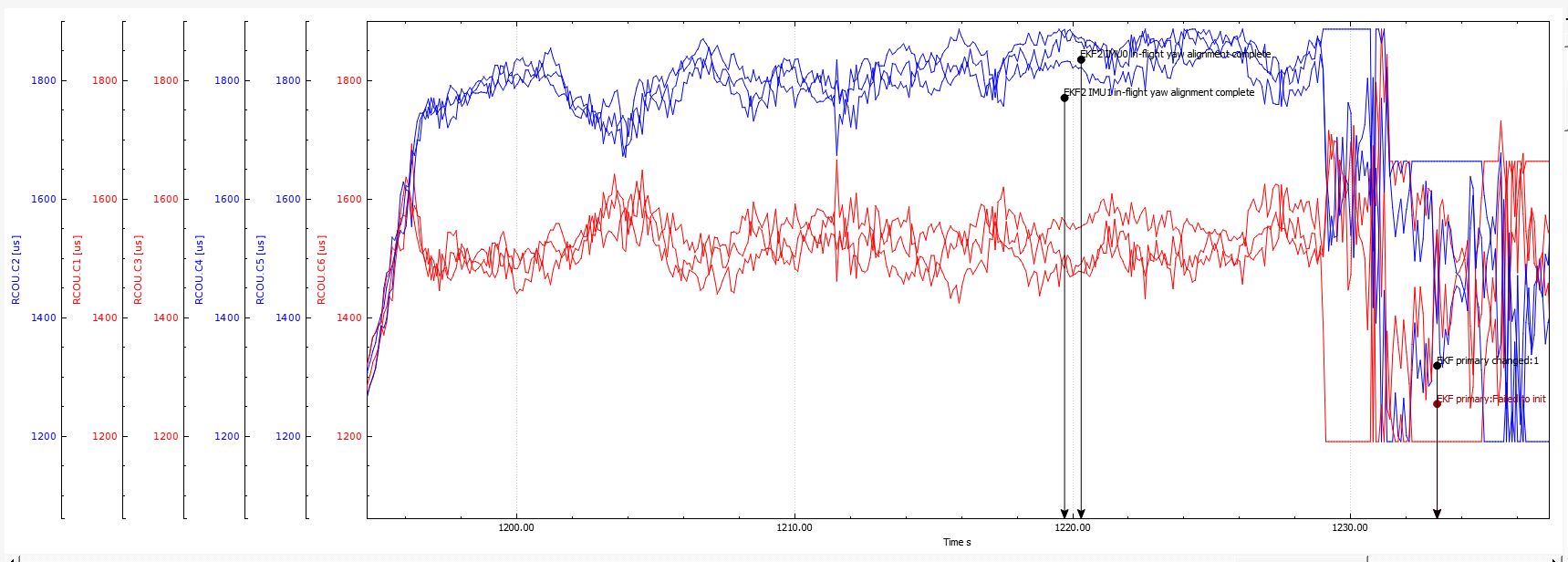
As Hosein says the CCW motors are working harder and close to max so there is no headroom for stability. Motor 2 was driven to maximum and motor 1 (opposite arm) was commanded low. Usually this means a loss of thrust on Motor 2 but in your case it just might be a mechanical setup problem. It’s fighting a large yaw bias which often times is because the motors are not level (twisted on the arms).
What do you mean by tuning instruction. I changed the pid values for roll and pithc in stablise mode. In the last flight it hovered above 2m off the ground for about 10seconds and the postion seemed to be very accurate visually. I will attach the video of the flight too. The drone crashed while climbing up
What might be the reason for this. Is it an mechanical issue or a compass issue. All my motor seem to be horizontal in the air
What would be the ideal vibration level for the FC. I have mounted my FC in top of foam pads. The vibration issue wasnt there earlier, but I disconnected and reconnected some components from the FC. Can the connecting cables to the pixhawk be a source of vibration. Also would an ekf error cause the drone to crash. I have set the failsafe to land.If you take a look at the video it seems to be a power loss.
Hi @dkemxr . Thank you very much for the reply. Can there be any other reason for the yaw imbalance like compass issue. Because the double checked to see of the motors are balanced and they visually looked so. Also the loss of thrust on motor 2, what might have been the cause to this issue. I checked the esc after the crash and I cant find any fault in them(Did the short circuit test with a multi meter). Thank you in advance
For vibration did you installed vibration damper unde FC also check hard cables they can transfer vibration from body to FC
i dont think its a motor or compass issue as dave said twisted arm cloud cause this problem also as my experience if your copter is on heavy loading this problem could happen
Could you please share your config and copter weight?
@hosein_gh Thank you for the reply.
I have added vibration damper under the FC.
The drone is a Tarot X6 with a AUW of 12Kg. The motors are tarot 5008 340Kv motors and escs are hobbywing xrotor 40A optoesc. FC is a pixhawk 4. So is this issue normal for any heavy copter. How do I solve this issue. Also as you mentioned before would an EKF error cause a power issue in the drone and cause it to drop.
Thank you in advance
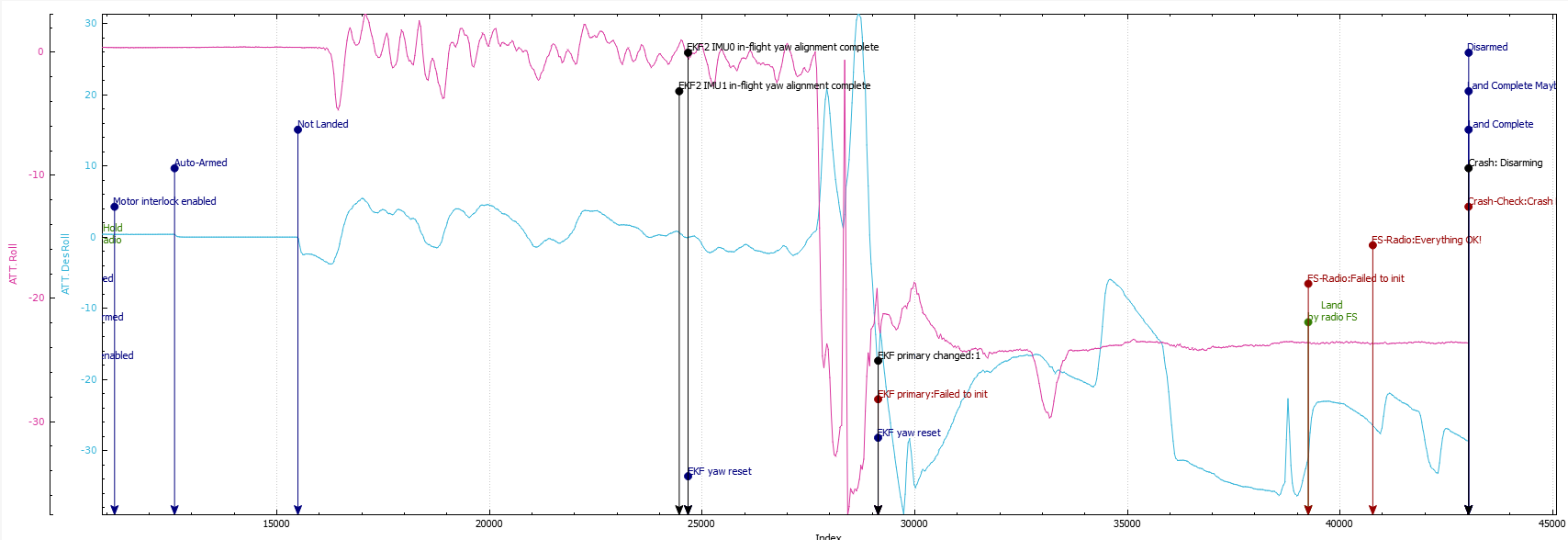
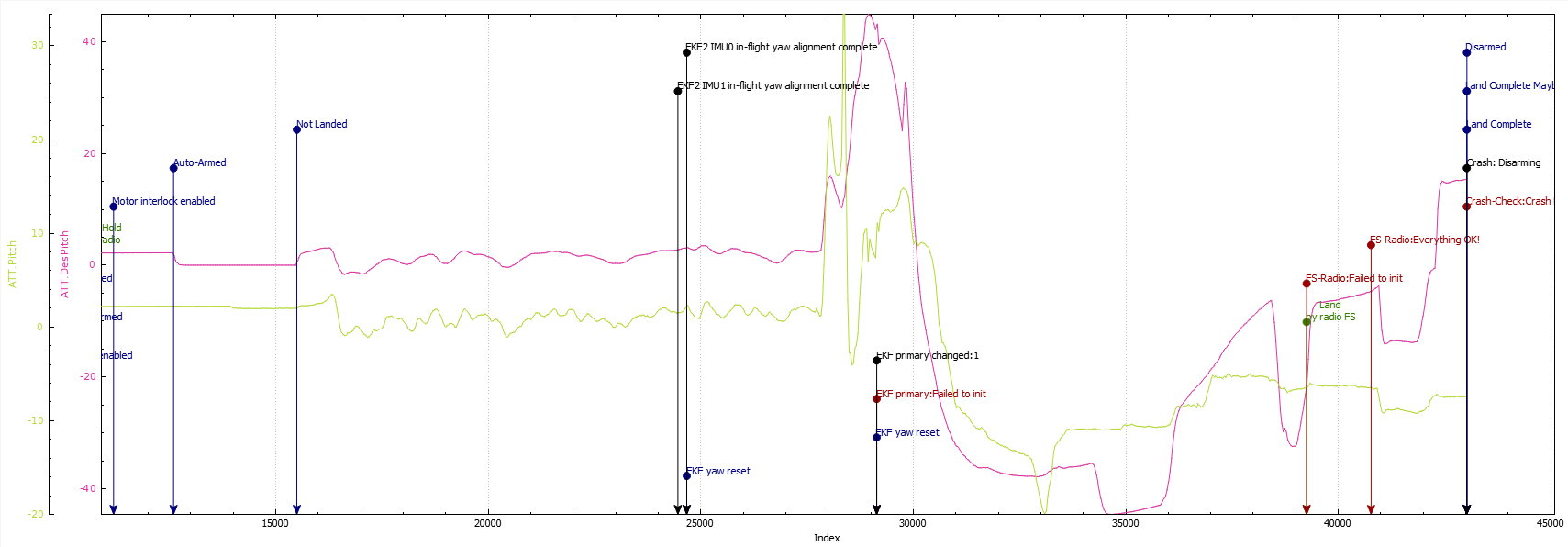
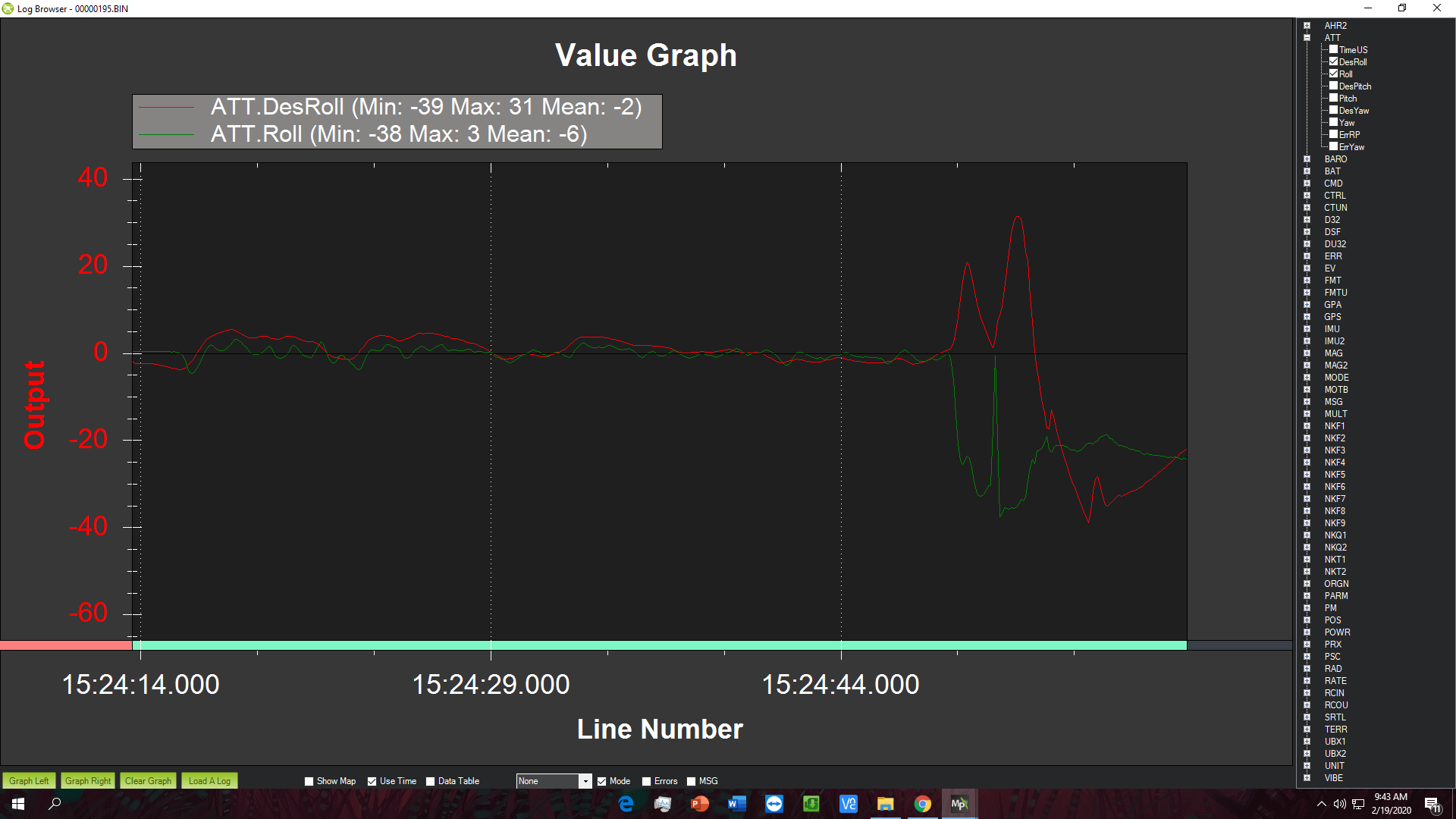
with bad or default PIDs on big copters like yours i will make difference between roll,DesRoll and pitch,DesPitch
totally its meaning that your copter will not able to keep stability
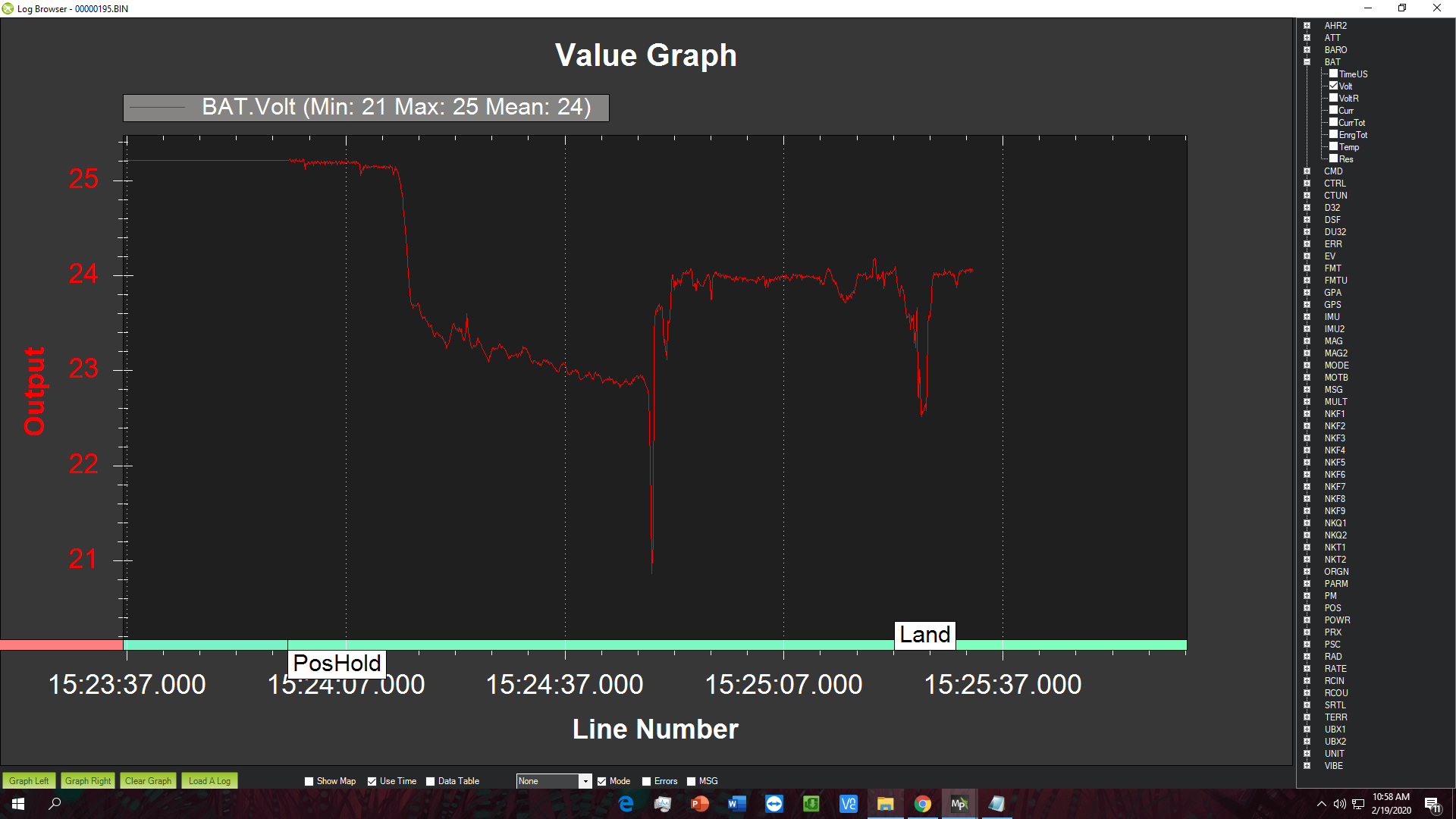
ok based on your log your battery must be 6s
your motors with tarot 1855 propellers could generate 3.5kg (95% of max because of your config
maxThrust=0.95) at maximum throttle
3.5 * 6 = 21KG so you are not in 2:1 thrust ratio bu still i think main reason is high z vibration
try a softer vibration damper also test your propellers with a balancer
@dkemxr@hosein_gh . The props are 1855 propellors. The battery is a 25c 22000mah 6s LiHv battery. During the initial takeoff the voltage drops by 2V. I guess this is normal due to the increased current draw. during flying. The drone started to crash at around 3:24:48 (time shown on the logs), and at this moment the there is a huge voltage drop. What might have been the problem here. Did a esc or motor fail and if so why?. Thank you in advance
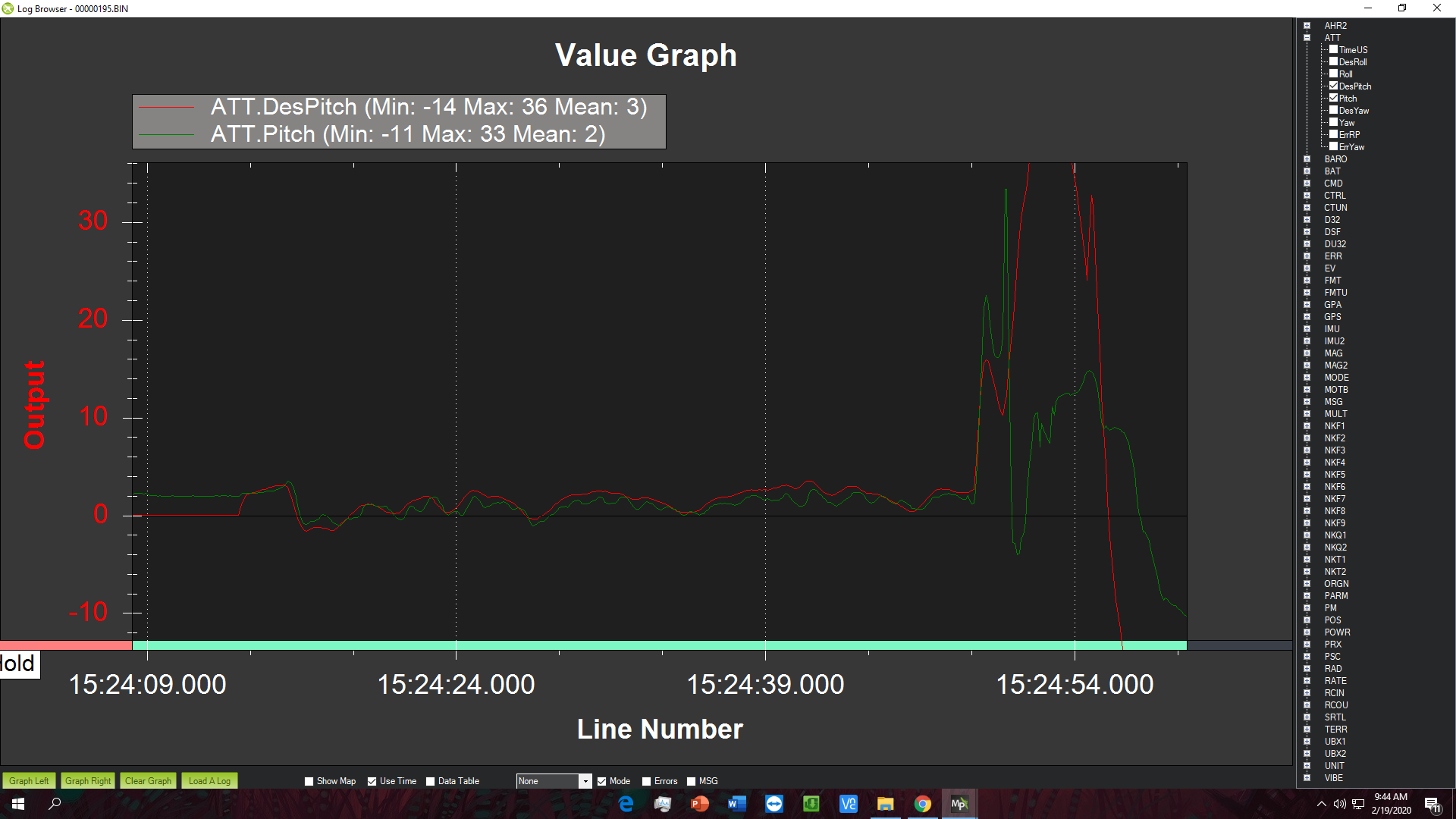
@hosein_gh. During the flight was there a huge difference between the desired vs the actual. The drone flew for around 35s from 15:24:10 to 15:24:45 when the drone suddenly lost power and fell. I have attached the desiredroll vs roll and desiredpitch vs pitch during the flight. The large deviations shown in the logs are after the crash. And drone visually looked stable. Do you think it needs more tuning and if so is the Autotune option goood
Also I have attchached a screeshot of the roll and pitch inputs. They remain fairly constant. Why does the desired roll and pitch vary when I havent given any throttle input?
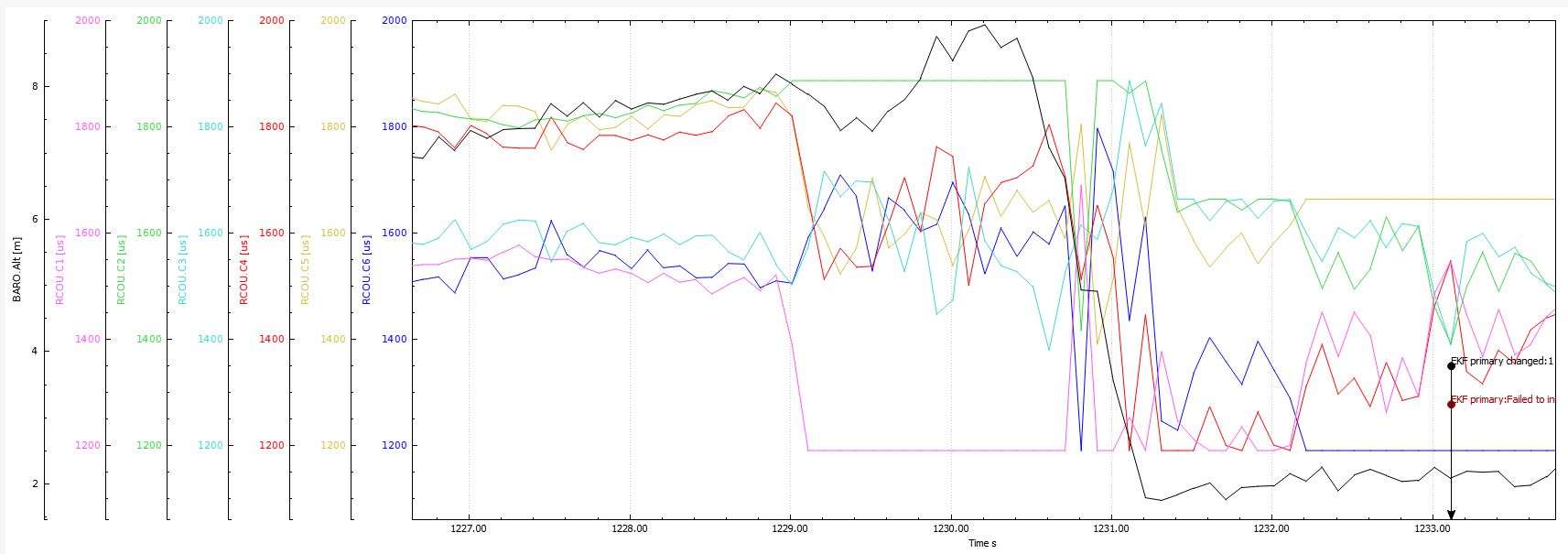
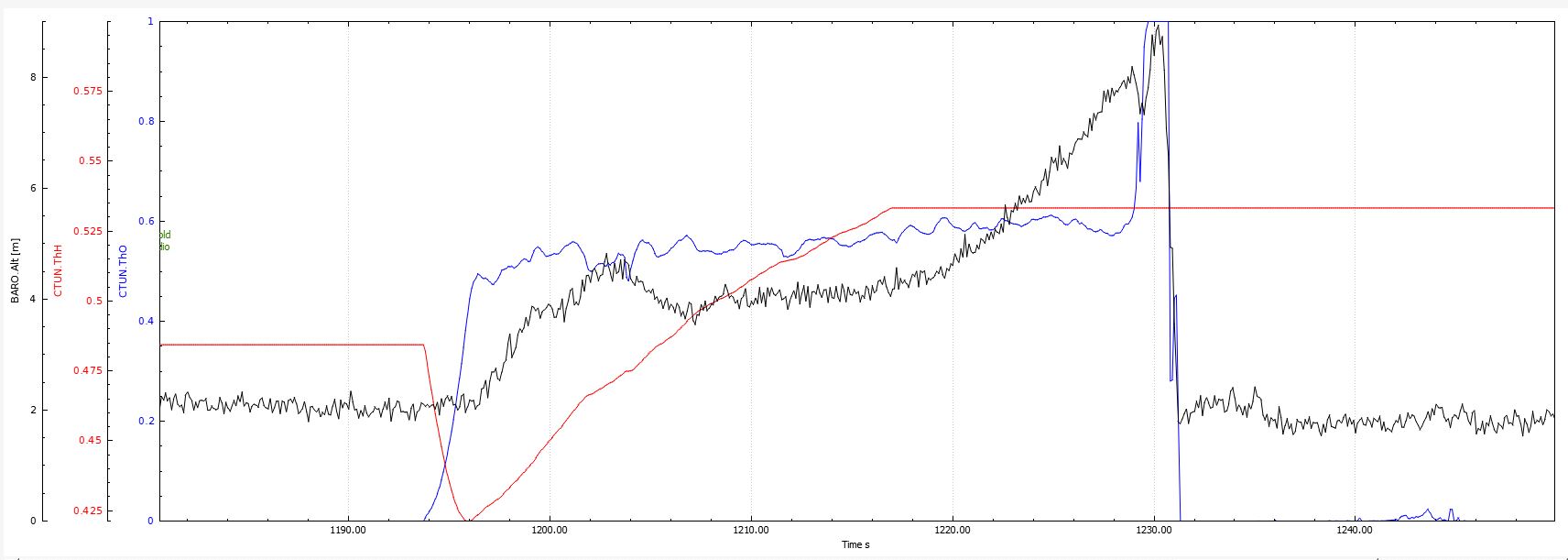
There are 3 problems with this craft. As I said earlier and as shown in the attached there is a large Yaw bias most likely from frame/arm twist or some mechanical issue. CW is red, CCW in Blue for effect. It’s also generally under powered for the weight. If the CCW and CW motor outputs are averaged it’s ~1650 PWM. The 2nd graph shows throttle at hover and the throttle learned value. Note how it continues to increase during the hover beyond .5. Another indication of underpowered/overweight. Unfortunately you do not have current monitoring configured but that battery is suspect. Vibration during the brief time it was hovering was OK.