Help understanding why it happened will be greatly appreciated!
Attached the log file:
00000254.BIN (218.1 KB)
Your desired roll and pitch are way off but I think the real first issue is excessive vibration.
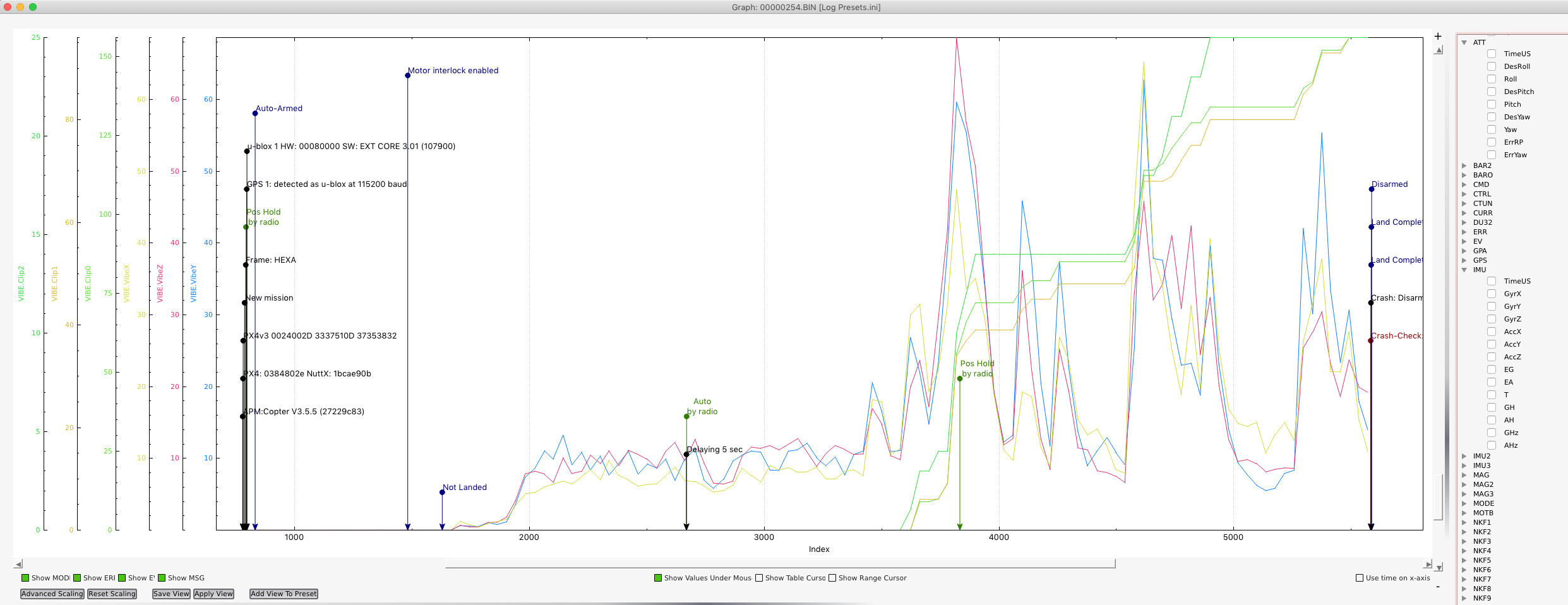
As you can see it is causing clipping and I don’t think much additional analysis is going to yield much until these vibrations are reduced.
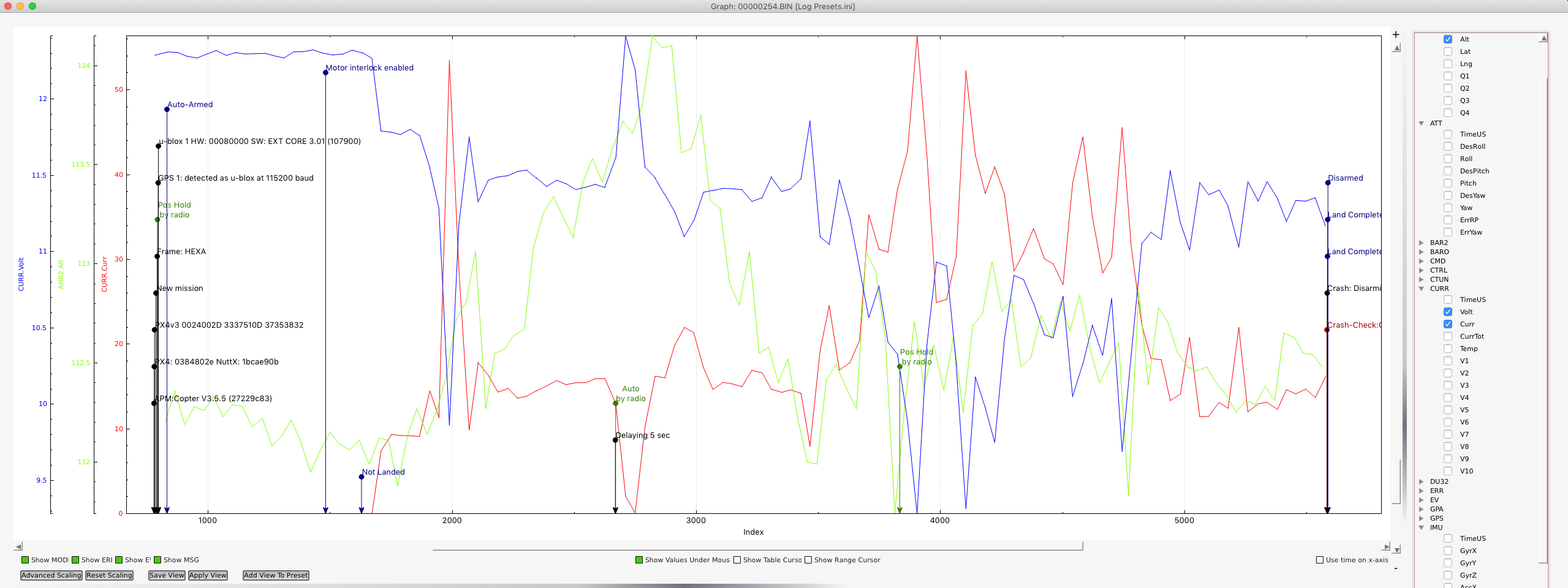
Your battery voltage is not keeping up very well with demand which won’t help stability.
2 Likes
Another common issue with crashes during takeoffs is the motor order or propeller direction is incorrect. It’s good to check with MP’s motor test screen.
1 Like
I want to add some information -
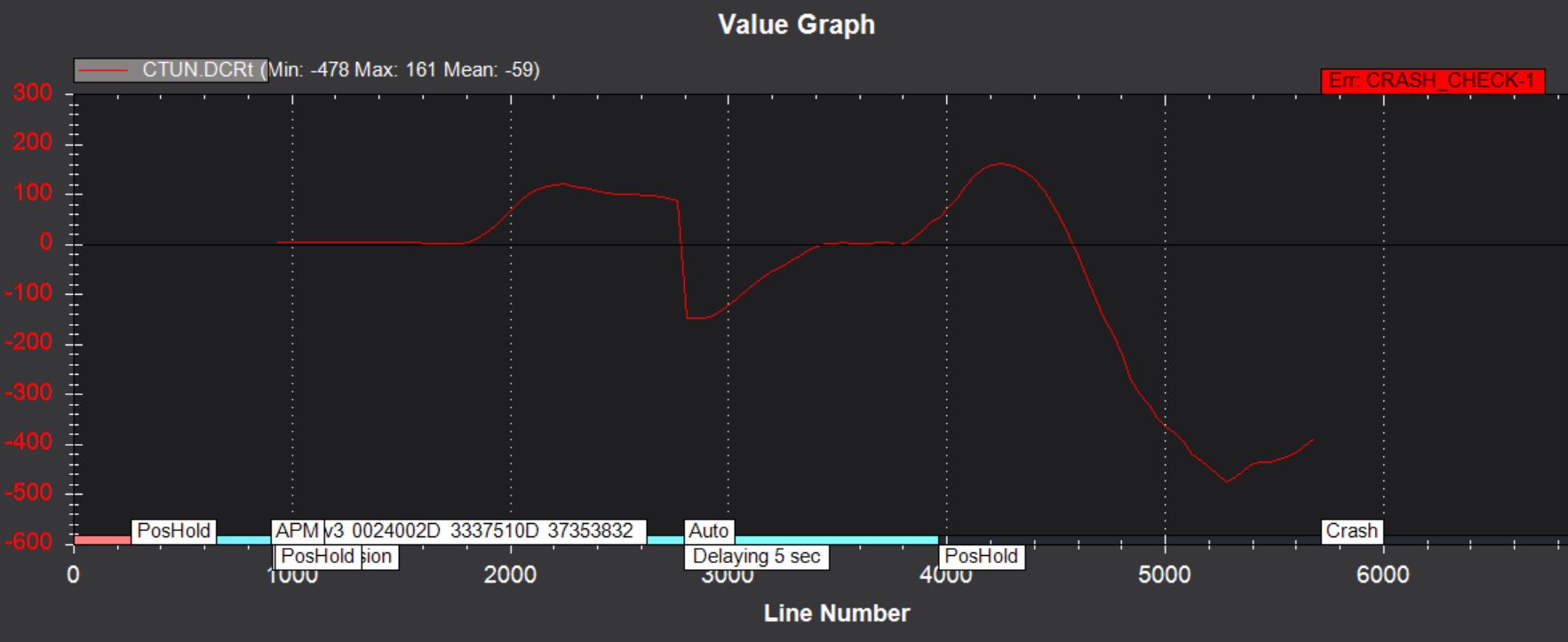
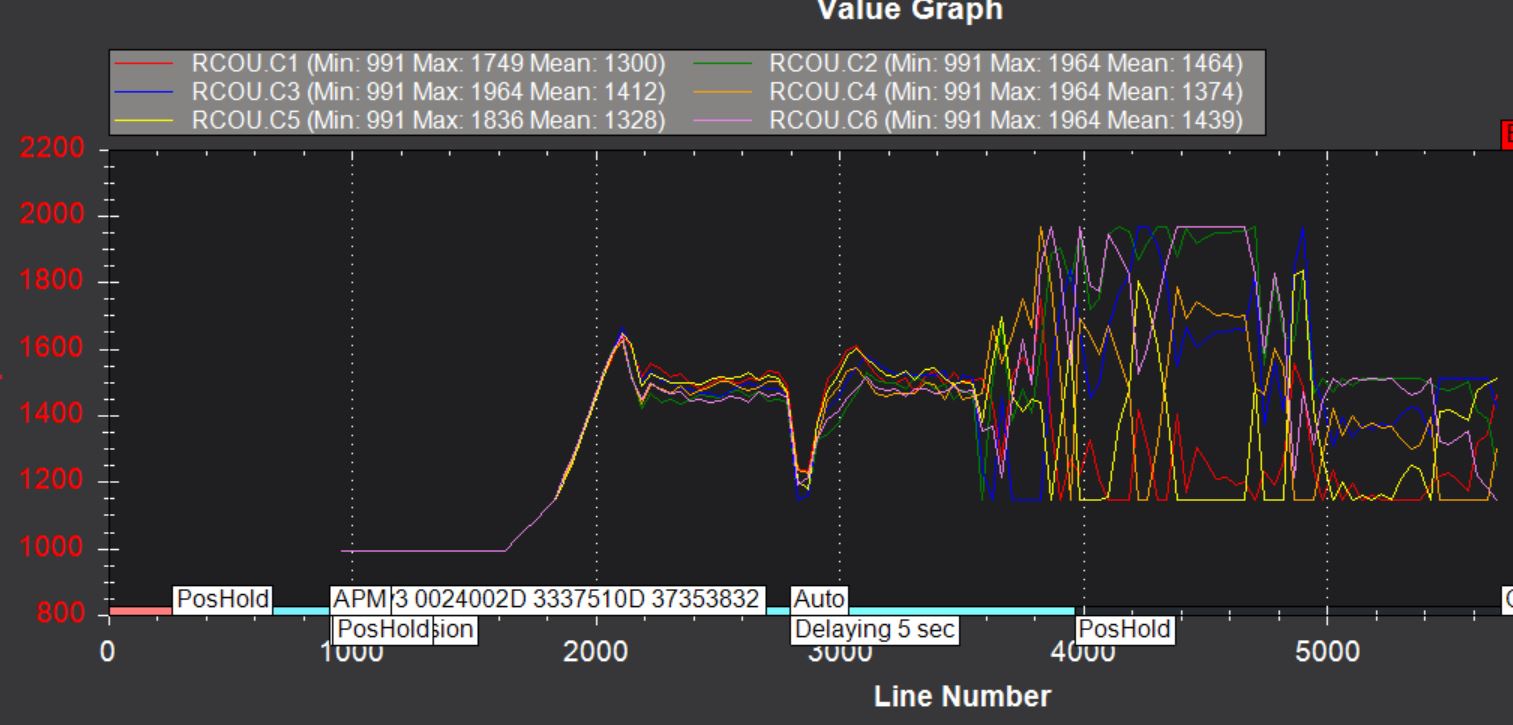
I initially climbed in POS HOLD, and than switched to AUTO. In the moment I switched to auto, for some reason the autopilot reduced the power to the motors instantly and significantly. you can see it in the log. I assume this also made it impossible to control the attitude of the drone which led to the crash.
I suspect the power reduction to the motors has something to do with the altitude estimation which seems off. Can any one shed light to this?
I am using a ulanding radar as a rangefinder.
Attached are images of the RCout, the desired climb rate and altitude.