Hello, I’ve built a simple quadcopter to learn more about photogrammetry and mapping, I’ve built it without previous experience but everything was working fine.
I’ve completed multiple test flights and some fully automated missions, all went well, and I was writing the various manuals I’ll need to fly it legally.
Then the country went into covid-19 lock down and I was unable to fly the drone at all.
Yesterday I was finally able to fly again, I wanted to test again the ESP-07 telemetry range but an annoying wind rose, so I decided to just fly close to me and test the overall behavior in windy conditions while messing with flight modes and the camera trigger.
The first 2 flights were perfect, the wind gusts were not a problem, but during the third attempt disaster stroke.
I heard the “flight mode change failed” message from the phone I was using with QGC, then the drone went down like a dead weight.
I was not swapping flight modes or using any command other than the main 4 channels at that time.
I did the mistake of turning off the RC so the drone engaged RTL but it was stuck into tall grass and went nowhere.
When I found it, it was still powered and the motors twitching (unable to spin due to grass), no visible damage, I immediately disconnected the battery.
I was able to do a bench test with no props on, motors/esc are not smoked but I need to know how to prevent the issue to happen again, next time I’ll not be this lucky.
Drone details:
X quadcopter 1750 grams
Battery: turnigy 4s 5200 mAh 12-24 C
Motors: Sunnysky v2806 650Kv
Props: Gemfan 12.38
ESC: HAKRC 35A Blheli_32
Controller: Radiolink Pixhawk (zener diode and cap installed)
Power module: The one supplied with the FC.
Gps: RadioLink M8N GPS SE100
RC TX: FLYSKY FS-i6X
RC RX: FS-iA10B
Extra voltage sensor: FS_CVT01
Telemetry: ESP-07S
Camera: Canon a2300
Camera trigger/power redundancy: Dr. Mad Thrust 5A HV BEC with Inbuilt Aux Controlled On/Off Switch
Copter version 3.6.12 (I was planning to upgrade to 4.0.X)
I’m using dshot 150 as suggested and MOT_PWM_TYPE is set to 4.
I’m using aux channels from 9 to 12 for the motors.
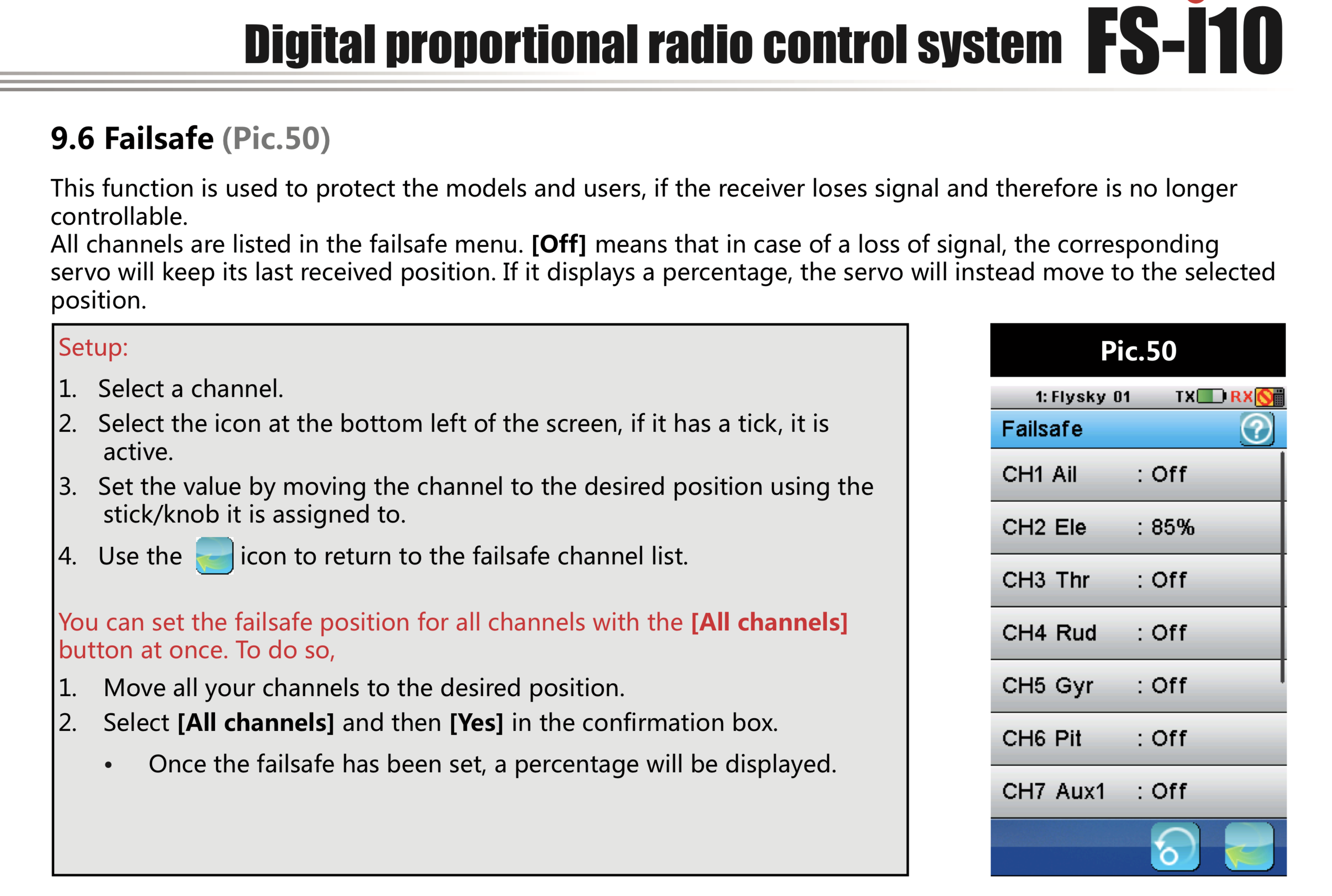
My failsafe options:
GCS: do nothing
Battery: do nothing (I measured it later and the voltage was more than 15V)
Radio: RTL
Crash check: Disabled
Radiochannels: (I have 10 channels max)
RC5: Flight modes
RC6: Nothing (reserved by arducopter)
RC7: Camera trigger
RC8: RTL
RC9: Motors emergency stop (this may be what crashed the drone)
RC10: Auto
Blheli_32 suite options:
Rev 32.7
Rampup power: 20%
Temp protection: 140 C
Low RPM Power Peotect: OFF
Low Voltage protection: OFF
Sine Modulation Mode: OFF
Stall Protection: Normal
Demag Compensation: LOW
Motor Timing: AUTO
Maximum Acceleration: 10.0% per millisecond
Minimum/Maximum Throttle: 1043-2000 (not calibrated, I’ve read there is no need for calibration with Dshot)
Brake on Stop: OFF
Non Damped Mode: OFF
PWM Frequency: 48 kHz
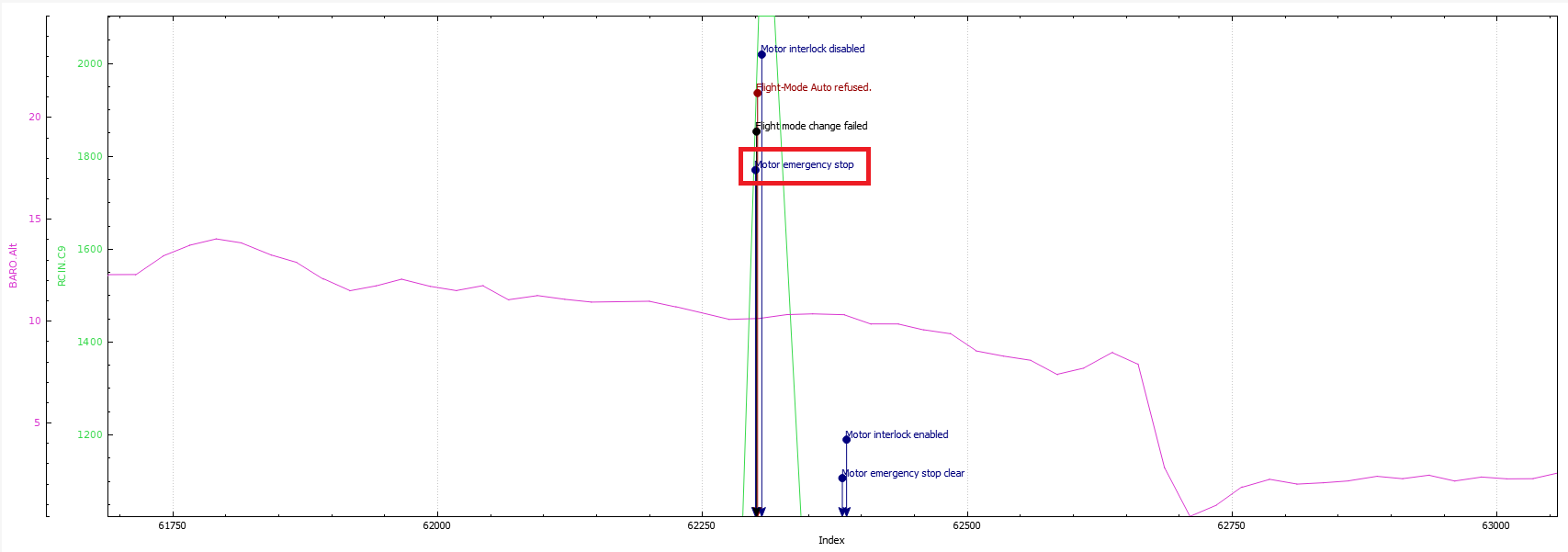
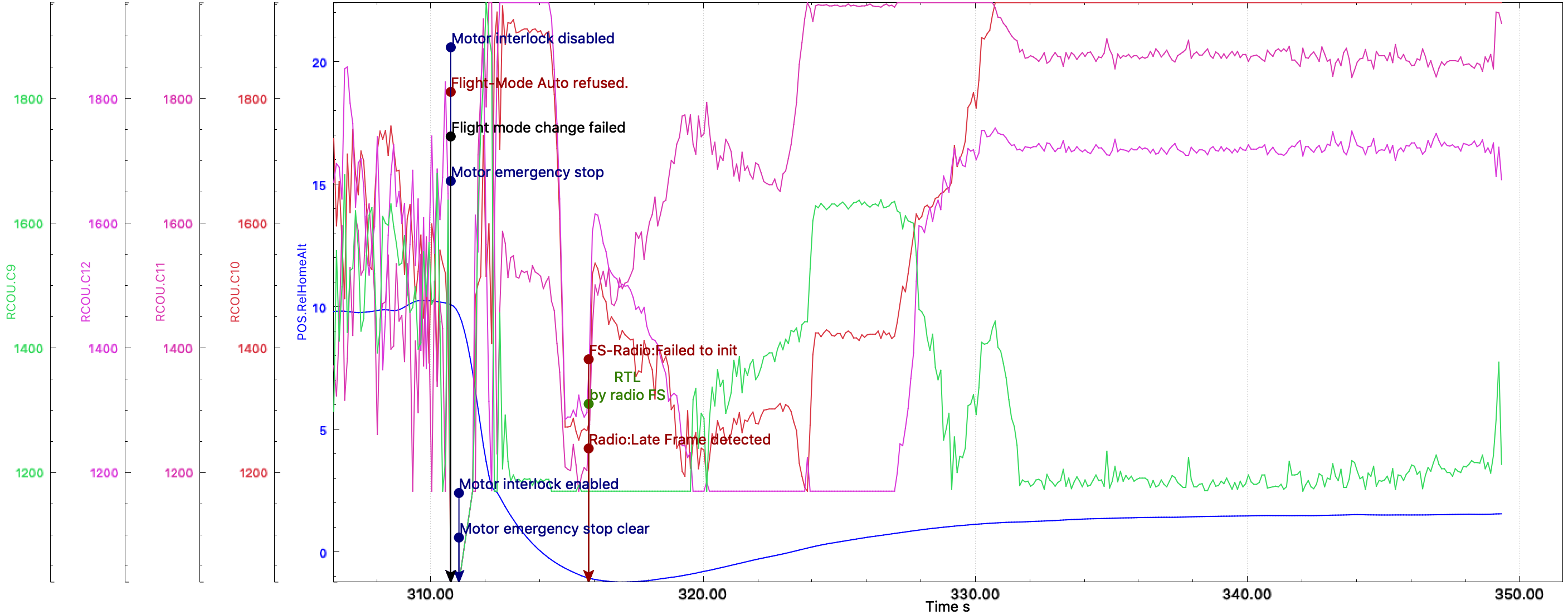
I may have spotted the problem looking at the RCIN section of the logs.
C9 and 10 have a sudden spike so automode and motor emergency stop are activated.
This may be the reason why the drone crashed down instantly and QGC told me “flight mode change failed” (I had no WPs mission loaded)
My automode is on a 2 position switch while the emergency stop is controlled by a rotary knob, I’ve not activated those by accident.
RTL mode works fine, tested in the past, the reason why it appears in the log it’s becouse I’ve turned off the radio by mistake right after the crash.
What is also weird is the behavior of RC 11-12-13-14, they are “activated” but I don’t have those channels in my radio equipment.
Could you help me to understand the nature of the issue?
I have problems uploading the log files, hope this works.
BIN: http://www.mediafire.com/file/764jntbo77u5qa0/2020-05-09_16-00-47.bin/file
LOG: http://www.mediafire.com/file/3h5s50qbolli4hw/2020-05-09_16-00-47.log/file
Thank you for your attention, sorry for the long post.