The quad is unable to hold its position well, tends to drift backwards and to the right slowly. Need help to figure out what cause the drifting please. Thank you
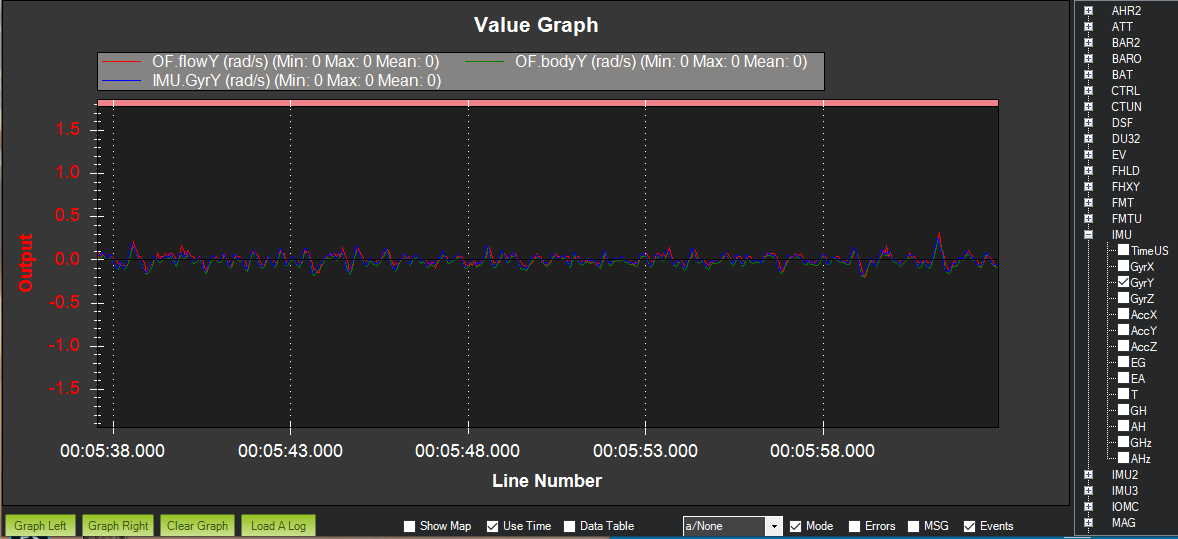
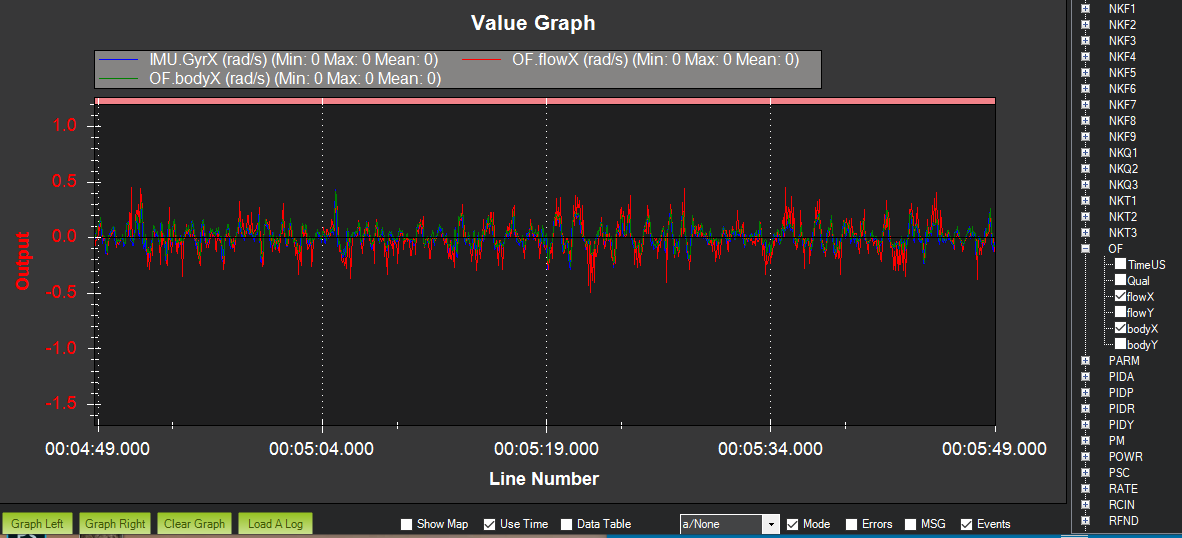
I also have the same problem where my quadcopter is constantly drifting in the y-axis. it’s a small drift but it’s noticible. I went back and checked my flight log and found out that the OF.BodyY graph is smaller than my OF.FlowY. I tried to follow the Hereflow Calibration and the instruction said to change Flow_YScaler so that OF.BodyY and OF.FlowY would line up. However, changing the Flow_YScaler seem to do nothing for me. If you ever figure out anything, please let me know.