While landing in land mode, my copter is drifting if air is present. Will controller make effort to counter the wind to enable land with zero attitude and zero velocity ? Is it somewhere related with the tunning of my copter? If yes, I had already performed autotune twice for my vehicle. please anyone help me to solve this problem. Is it possible to land in GPS lock mode ? Suppose i set the loiter mode using knob and then landing using switch of transmitter, will it override the previous commend or try to land by utilizing both the commend simultaneously.
If you have GPS, Land mode will always attempt to descend straight down, it will resist wind and try to maintain zero horizontal velocity (it cannot also maintain zero attitude if there is wind). This includes when you are landing during an Auto mission or with the RTL mode. You do not need to set Loiter mode first, Land mode will always use GPS to hold position if it is available.
If it is not holding position well, it is possible that it is related to your copter’s tuning, but probably there is a different problem. Does your copter hold position well in Loiter mode?
Yes i am holding position nicely in loiter mode. What i have faced that my vehicle still drift during landing phase of flight.
Interesting. Can you please upload a .bin log of one of your flights where you experienced this?
please find the attachment. here the roll behavior and battery behavior is very poor.
2018-04-02 18-01-58.log (1.54 MB)
can you conclude something after watching the log that what could be the possible causes of accident ?
It is difficult for me to tell exactly what went wrong, as it seems that the drone never got into the air. However, I did notice some potential problems:
- Please perform RC calibration again. The values seem incorrect. The RC Trim (middle stick) values are the same as your RC Min values.
- You should probably set MOT_SPIN_ARM to 0.10. This will cause the motors to spin at low speed when you arm the drone, which is both a safety feature and helps to prevent problems with motor startup when taking off.
- As you noted, your battery was not charged (or your voltmeter was not calibrated).
Sir, i have checked it once again and noticed that my middle throttle is not same as RC min value. Sorry to say that but I don’t understand how you got this from flight log. My pitch min value is at 1203 PWM, roll is 1151,yaw is 1147. I am agree with the point no 2 and definitely keep my eye on point no 3.
Thank you sir. thanks for your support.
Hoping your helping hand in near future also to change my hobby into a profession.
The parameters are also included in the flight log. Here are some of them:
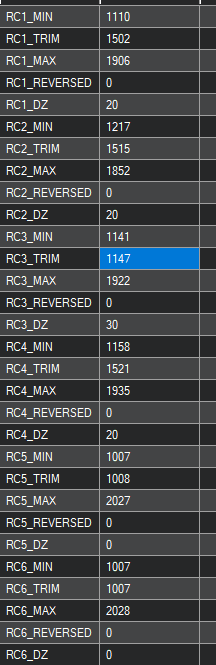
However I was mistaken when I said that TRIM should not be the same as MIN. That is okay for some RC channels. Your values are inconsistent, though, so an RC calibration might be good anyways.
Thank you. i will follow it. thanks for your precious time.
i just want to conform that how the battery of transmitter affected that the range of the particular transmitter. my transmitter range is too low, so i am thinking that whether this problem could be from the side of transmitter battery ?
The log did not show any RC failsafes or problems with RCIN, so I think your transmitter did not cause any problems in that flight.
ya sir. i did not observed any fail safe but just for the information, i am asking this. If any one can tell me that .
Oh I see. I suppose it’s possible, but probably there is some other problem, because the transmitter will regulate the power of the radio and shouldn’t be affected by battery voltage unless the battery is over-discharged.
Which transmitter and receiver are you using?
its a very basic version FlySky FS-CT6B
As long as the power LED is green, your range shouldn’t be affected by the battery. Usually range problems have more to do with placement of the receiver antenna and the orientation of the transmitter antenna.
Hate to say this, but that radio is junk. I know because I have one. I got it many years ago as part of a 450 heli RTF kit. The radio is functional, but changing any settings requires connecting it to a computer, the stick potentiometers are low grade and very noisy as are the trim potentiometers and the potentiometers for VRA and VRB knobs, the gimbals are sloppy and don’t always return to center, the thing eats AA batteries like a kid eating M&Ms, and the range is horrible.
I never used the thing on a multirotor, but I know you can’t use this radio with a heli that has a flybarless gyro like the Tarot ZYX-S and ZYX-S2, and K-Bar gyros that I have.
I looked at your log, and I’m wondering what the specifications are for the parts (motors, ESCs, props, battery, etc.) you are using, what frame are you using, and how much does the aircraft weigh with the battery installed??
What puzzles me is according to the log the aircraft was running at just under 12 volts and pulling almost 50 Amps.
Also, how long was the aircraft actually in the air? If I read the log right my guess is about 2 seconds, maybe less…
thank you sir. your valuable suggestions are always welcomed from my side. will you please suggest that which transmitter is good for multirotor ?
Taranis. In my opinion you cannot buy a better radio at the same price.