will you help me to get the data of any device or value that is sensed from ADC 3.3, on ADCIN pin ?
sir in one more flight during landing i meet with an accident while landing. will you please give some suggestion about the reason behind this error msg and how it can be eliminated. I am am sharing one of the flight log corresponding to my last flight.
https://drive.google.com/open?id=1_4PkGAYfz8N1BUu5tArCchddhQ5lfQBe
The position estimator is very confused. Here is a picture of your flight path:
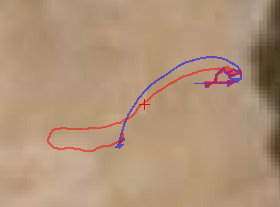
The blue line is GPS position. The red line is the EKF position estimate. The position estimator received bad sensor data, causing it to lose track of its position. You can see where the red line moves far to the left of the blue line.
From the log, it looks like something on your copter broke during the flight. 7 seconds after entering Land mode, all of the sensors go crazy except GPS. Vibration, compass, gyro, etc. all experience a severe shock in sensor reading. My guess is your GPS mount broke and fell over or something like that.
sir i am sharing a flight log for my last fight of hexa. During flight, i have observed that my hexa is oscillating too much on pitch axis. Even after some time i lost the control and hexa just flipped upside down. The same behavior observed three time whenever i tried to lift the copter up. please help me to find th difficulty. Here is the log of one of the flight.
https://drive.google.com/open?id=1lg6nOOV5n-kxOMzC9Miz6-pLGfUTZIvy
The oscillation is probably a PID problem. Looking at your log, I see that your pitch rate PIDs (ATC_RAT_PIT_P, ATC_RAT_PIT_I, ATC_RAT_PIT_D) are quite low. However, your angle PIDs are very high; ATC_ANG_PIT_P is 18, which is four times the value for roll!
I do not know how this value got changed (did you do an AutoTune?), but it is probably too high. Try lowering ATC_ANG_PIT_P to 4.5, which is the same as roll. Then maybe try using AutoTune to improve your PIDs if needed.
yes sir. i performed auto tune and then got all the data.
Along with it i need one more help that i am using AVIONICS C2830 850KV motor. It’s specification is as follows :
Specification:
● Kv (rpm/v): 850
● Power(W): 250
● Wire winds: 14
● Resistance(mΩ): 272
● Idle current(A): 0.6
● Cells Li-PO: 2-4
● Weight: 52g
PROP - 10x4.5R(Quad Prop)
● Get 750gms Thrust
Lipo - 3 cell 11.1V
Operating Voltage – 11.2V
Amp draw at load - 9.2 amp
ESC - 30 amp
Power – 101.2W
I just want to know that is it possible to get the higher thrust with the higher battery ? Like the details are given for a 3S battery. Is it capable to produce more thrust by only upgrading the battery ?
along with this will you share some concept to decide the motor and the calculation for thrust computation and motor performance?
Yes, you can produce more thrust by increasing battery voltage. However, please be careful about doing this - you must be certain than the motor, prop, and ESC can handle higher voltage. Please check the specifications to see if they can be used with a 4S battery. And once you upgrade the battery, you should perform some flight tests to make sure that the ESCs and motors are not overheating. You can do this by flying for 30 seconds and check temperature, then 1 minute and check temperature, then 3 minutes and check temperature.
For performing basic calculations for motors, eCalc is a popular tool for exploring motor, ESC, propeller, and battery combinations. It costs $1 USD to get the full version, but here is an example screenshot (I guessed your quadcopter weight is 1500g):

ok sir i will follow this. Thanks for your valuable suggestion.
Hi Rick,
i made a mission to execute two circles at an altitude of 20 m then go to another point and then come for RTL (point was defined for RTL). But what it did was completely annoying and out of the box. will you please see this attached log and comment that what is the reason behind this ?
https://drive.google.com/open?id=1XMgpMoekl4lpSEaW_cy9Mfwu6IUinYgC
Dear Rick,
please suggest the way to resolve this problem and the level of diagnosis that i should perform to eliminate these things completely.
I see two problems in this log:
First, your transmitter failsafe is repeatedly being triggered. It looks like a bad connection with your RC transmitter. Each time the RC In channel 3 (throttle) drops is a disconnect. Eventually, it completely loses connection as the drone flies away.
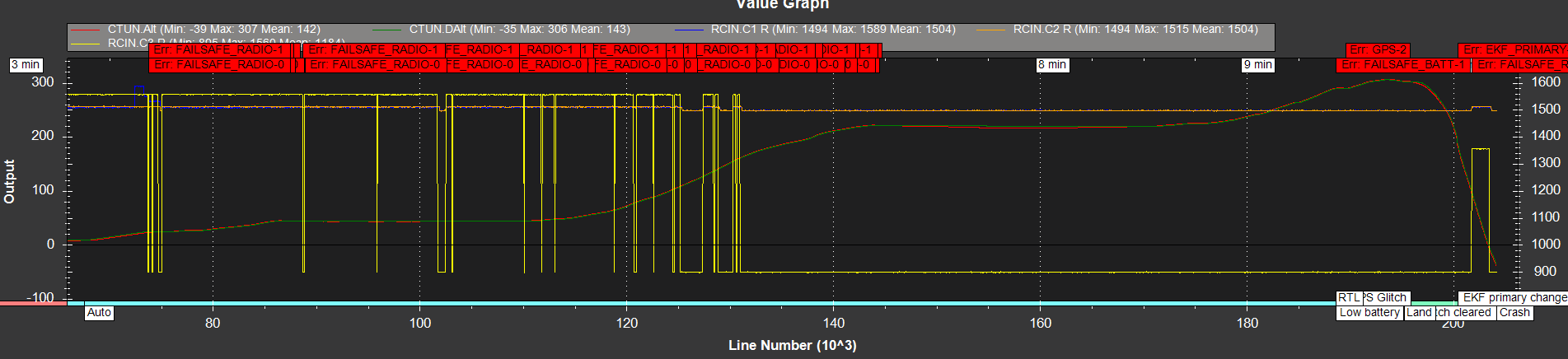
This is a problem that you should fix, but it did not cause the fly-away. I think we saw radio problems with one of your earlier flights. Are you using the same transmitter?
The second problem is what caused the drone to fly too high: vibrations.
This is the first part of your flight, when the drone is ascending to 20 meters (24 meters EKF altitude).
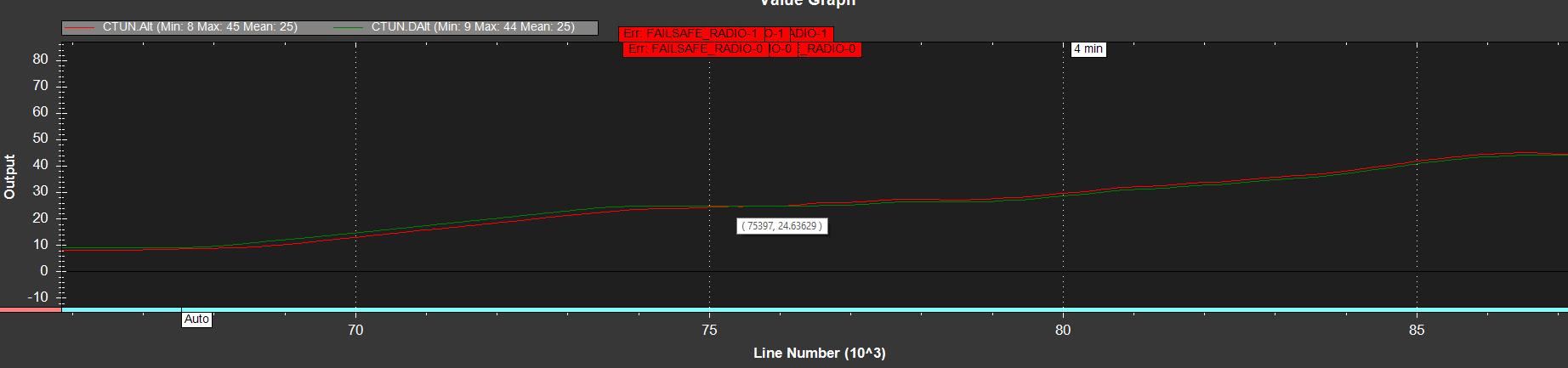
In ArduPilot flight logs, you can see what the drone is trying to do by comparing desired versus measured attitude. For example, in this graph, the drone wants to make the red line (measured altitude) follow the green line (desired altitude). You can see that in the first half of the graph, this is ture - the red line follows the green line upwards until it gets to the correct altitude. However, in the second half, you can see that the red line begins to go upwards, even though the green line stays below it. This means that the drone is climbing upwards, even though the flight controller doesn’t want to. This indicates that the flight controller cannot accurately estimate its climb rate.
Climb rate estimation heavily relies on the accelerometers, which can be confused by excessive vibration. Here are your vibration readings:
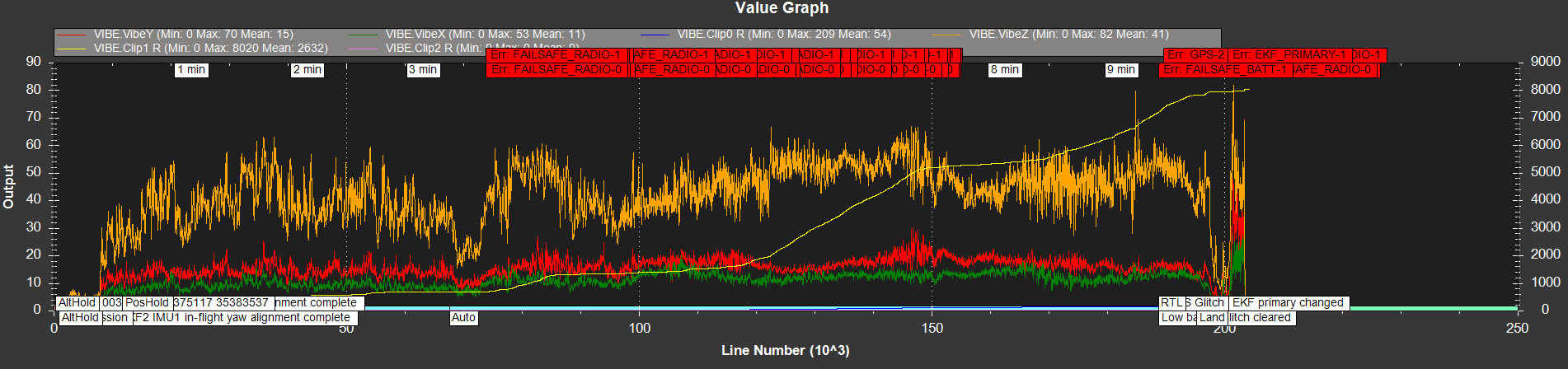
In general, you want the vibration measurement to be less than 30. Also, the accelerometer clipping VIBE.Clip should never increase in flight. The very high Z vibrations and clipping are certainly the cause of the uncontrolled ascent by the drone.
Try to mount your flight control board to reduce vibration, and make sure that nothing is touching it that could rattle against it, such as loose wires. If you post a picture of your current mount, we might be able to suggest some improvements.
The short version is, you must do two things:
- Fix the RC transmitter/receiver so that you do not lose connection in flight
- Fix the vibrations so that they are less than 30, and the clipping does not increase while in flight (some clipping on takeoff or landing is okay).
Sure I will post pic don’t arrange t.
But one thing making me confuse is that when I made a mission with only 40 m of max altitude at way points. How it is taking this high altitude in the desired altitude (DAlt) flight log whereas mission is design only for 40 m ??
The desired attitude can get “dragged around” by the actual attitude. This is true for technical and safety reasons, which can prevent the drone from doing crazy maneuvers.
For example, in your case, if the desired altitude stayed at 40 meters, the drone would keep trying to descend by 100+ meters. But what if the measured altitude was wrong? The drone would try to fall into the ground. This “desired dragging” makes sure that the drone never tries to execute extreme maneuvers by ensuring that the desired and actual attitude are always reasonably close to each other.
HI rick ,
is there any way to check the capacity of my drone that how much wind it can take ? what kind of changes you are suggesting in parameters to increase the capacity keeping all the hardwares same ?You can use eCalc to get an idea of your drone’s payload capacity. Otherwise, you can build a test stand to measure the maximum thrust of your motors.
There’s no real way to increase the drone’s payload capacity without changing hardware. It is limited by the motor’s performance and the weight of the drone.
Hii Rick, Actually i don’t want to increase the lifting capacity of my drone rather want to improve the performance like fighting against the gust and even fly against the gusty wind, more stability, less vibration etc (keeping the power plant unchanged). Is there any suggestion from your side, link or some kind of reading stuff that you can provide me so that i may get some idea to incorporate the amendment that i mentioned above ?
hi rick ,
i have a doubt about the vehicle performance. what will happen if i use a overpowered quad copter in auto mode (alt hold, pos hold) and in manual mode (stabilize and acro) ? How does it behaves ? If i want to forcibly use an overpowered copter what will be the consequence ?