I am working on a fairly heavy Rover that can carry 500 pounds of weight and 1000lbs of towing capacity.
When the Rover is going downhill, it accelerate a bit due to heavy weight and nothing to do with the throttle control.
This problem will, I believe, may also confuse way point navigation feature (not tested yet).
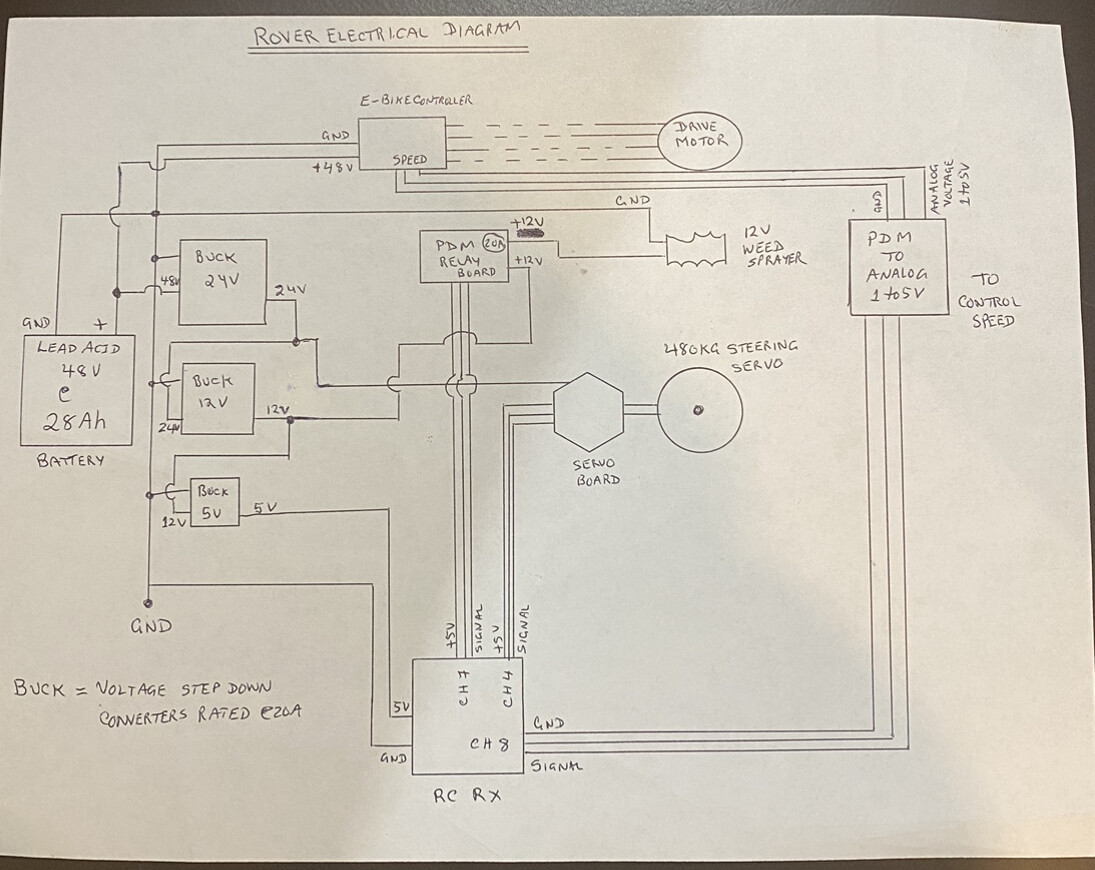
Is there a feature in Ardu Rover code that would kick in to maintain a constant speed while going downhill using the brushless motor brake feature? My motor does have hall sensors and I am using an e-Bike controller.
Have a look at ATC_BRAKE. Depending on how your speed controller works, that may be a viable option.
Otherwise, it may be possible to (Lua) script a decel routine to keep speed in check, again, depending on how braking is implemented in the controller.
We may need the Ardu code developer to chime in. Not sure who is the stake holder for Ardu Rover.
Agree, last option would be to write a custom Lua script. Use of reverse feature can not be used as braking mechanism. The rover will go into a free fall due to its weight also there is no mechanical drive train system inside drive system.
Received a response from e-Bike controller manufacturer that the brake feature is a sudden brake not a gradual slow down. So, even if we make the Ardu Rover code to kick in, that will Not solve the weight vs. gravity vs. object in motion pull and downhill velocity issues, considering the weight of the Rover and the angle of downhill. Hmmm too many variables to deal with.
The reverse feature will not work at all.
This leaves few choices on the table.
An external braking system like a car has and use the FC tilt feedback to apply brakes in real time. This will require tons of programming and may even need a companion computer.
The other thing I have observed that the width of the Rover makes a huge difference when turning on hills especially downhill.
I may have to re consider the entire mechanical design of the Rover.
Looks like back to the drawing board again…
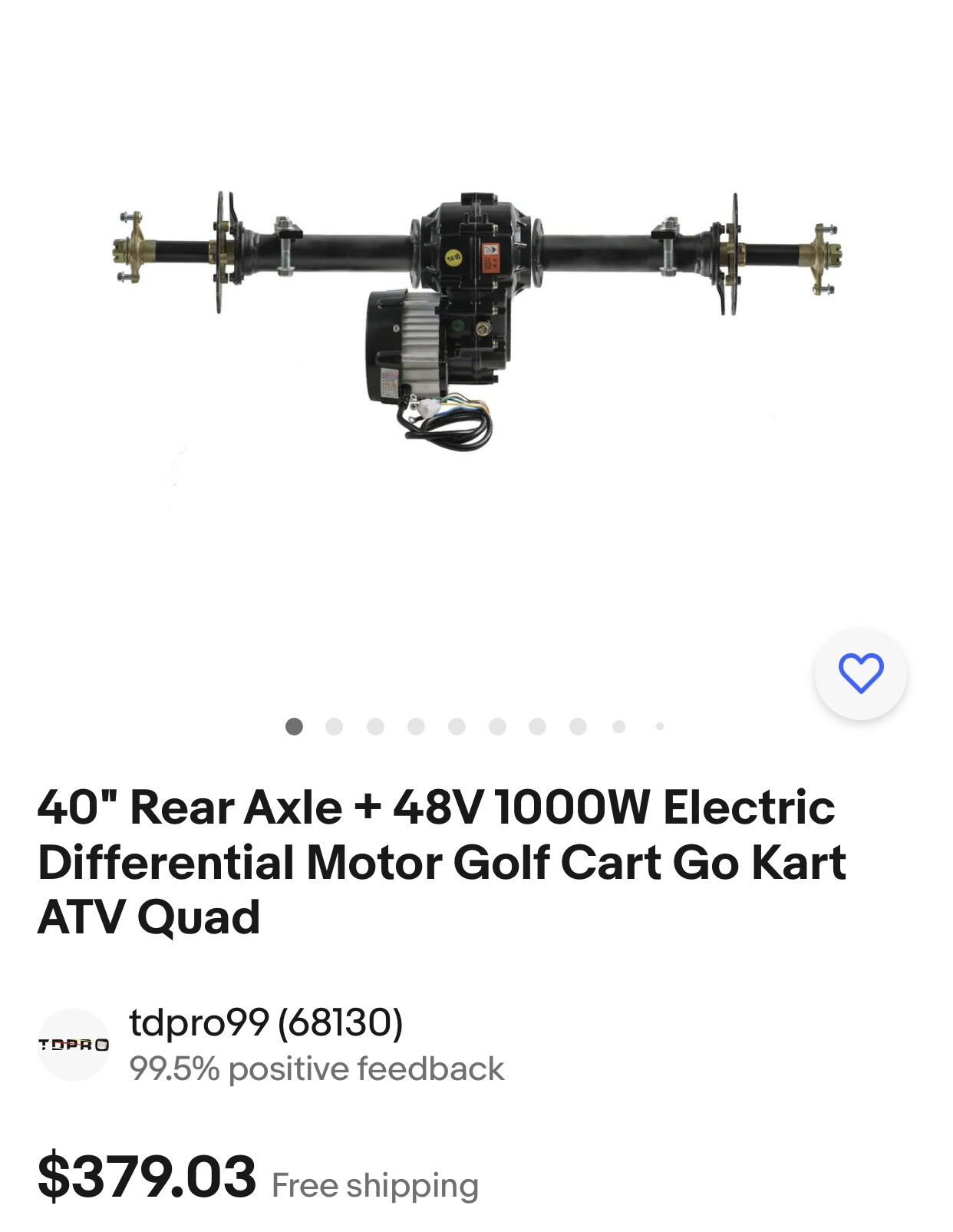
p.s. maybe buy an old golf cart and take it apart.