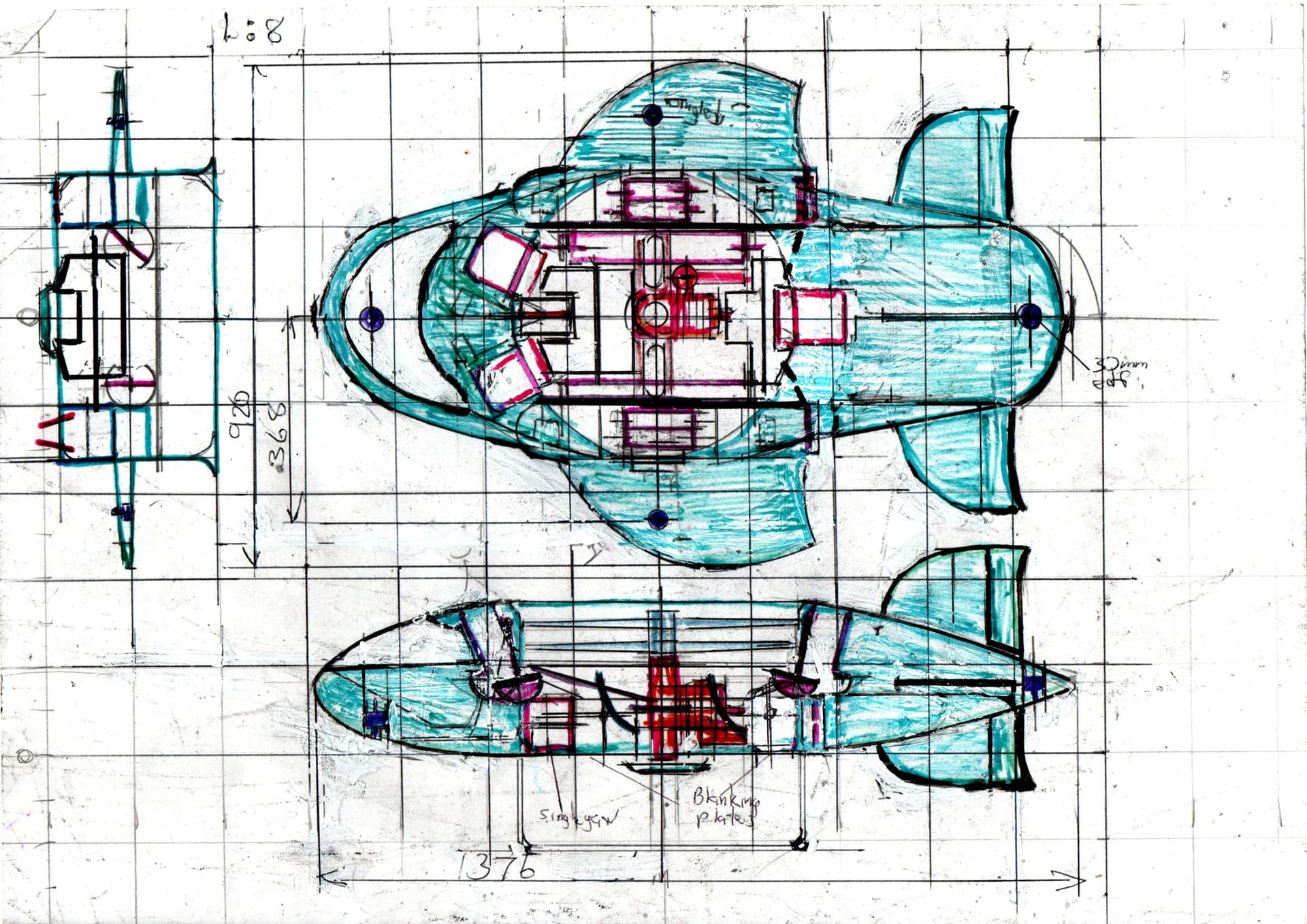
I am working on a combi-copter intermesh design.
It does seem similar to a coax in some ways.
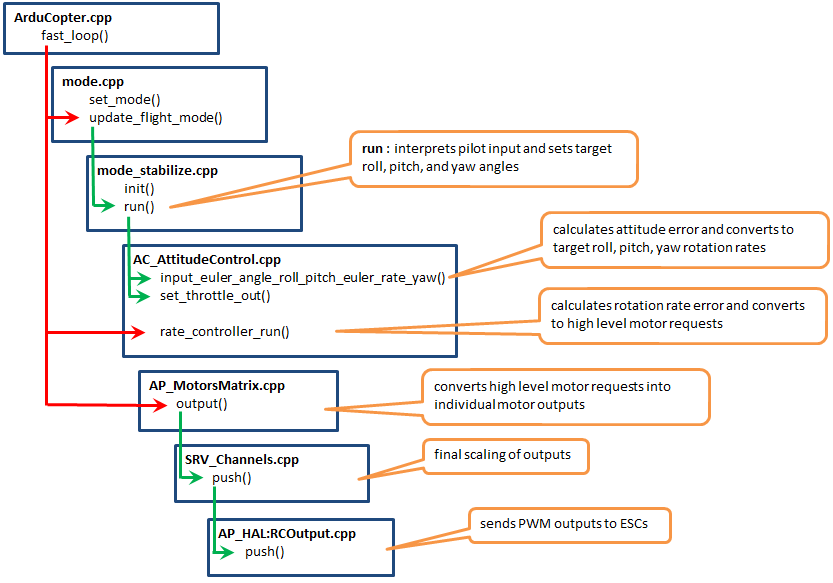
After looking at the Arducopter code system, I am going back to planning for add-on Arduino boards.-
much simpler, and functionality and build is more modular.
My first issue is what to do with thruster and elevator controls. Direct intermix does not seem appropriate.
there are several elevator instances, for example: high angle thrust-assisted climb,
slight rotor-down, thrust assisted level flight,
“airplane” flightpath emulation,
Aerobatic manoeuvres with tail thrust,
low tail thrust, high rotor forward thrust.
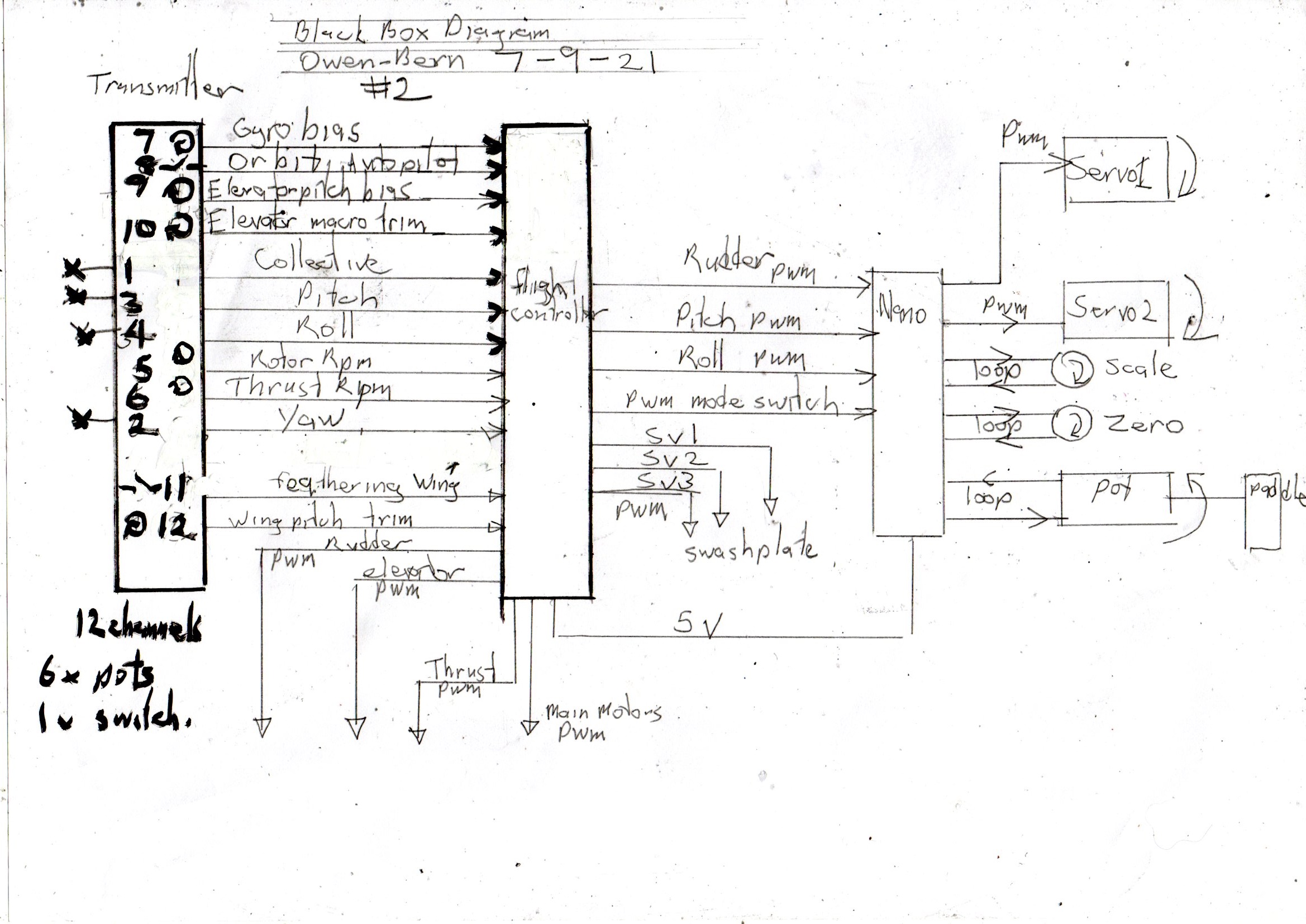
how much intermix/ multiplex, and how much separate pots on the transmitter?
Can I do multi-input intermixes: thrust, pitch, level of intermix transmitter controls?
-Issue 2: feathering wings, with elevon/aileron and pitch control.
I want yaw control and low speed manoeuvring when vertical,
and possibly aileron and pitch trimming when horizontal.
I can do a servo following a sensor pot on an airflow paddle, or is a digital rotation counter a better bet? I also need a calibration input, and a trim input.
I can run a PWM output from the flight controller for pitch trim,
and another for mode switch to feathering.
I can set an angle point to allow low speed mode change, with multiplex to rudder and
fore and aft pitch.
when angle of attack mode is selected, then I can multiplex to roll pitch.
Questions:
Can I run some of these multiplexes as ardupilot output channels via PWM?
How many output PWM channels do I have with Matek F-765 Wing?
I need 2 motor channels- one can be ganged together for two main drive motors.
Is there anything I have missed out?
I don’t think I need gyro on the Arduino. A Nano would probably do.
Is there anything I have missed at this stage?
Feedback is appreciated.
I need to settle on a control development plan, and reduce my variables a bit.