Hi all,
I have recently bought a hexacopter and I was trying to do a flight test with it. I tried to test the Stabilize, Loiter, and RTL modes.
In stabilize mode, the copter went haywire, it was really hard to control and was not leveling itself. Then I hit the RTL button as a last resort, and luckily it landed safely, afterward I checked but could not find any problem on the field.
Then I took off again in loiter mode. Copter took off ok but after a couple of seconds it started to do the toilet bowl movement, and also yaw by itself without any RC input. Then I used RTL again and landed safely.
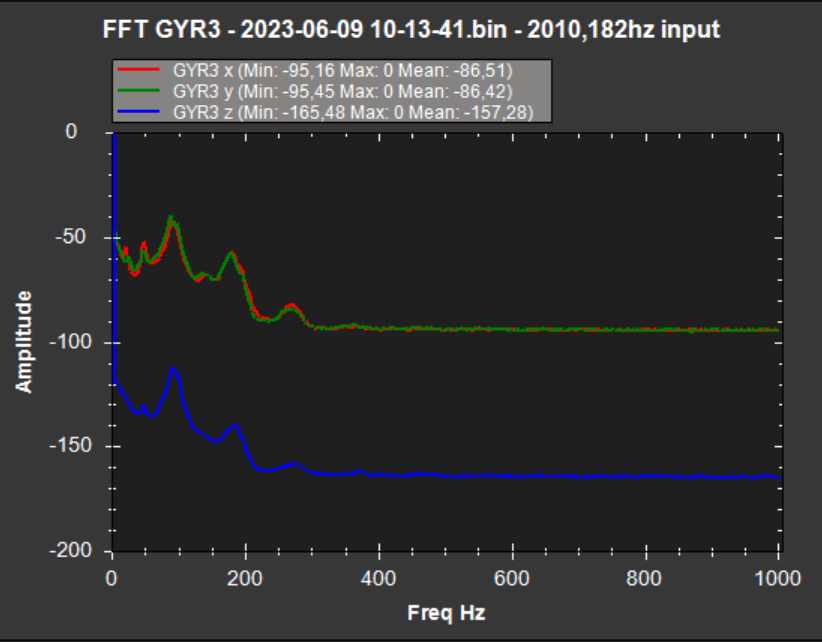
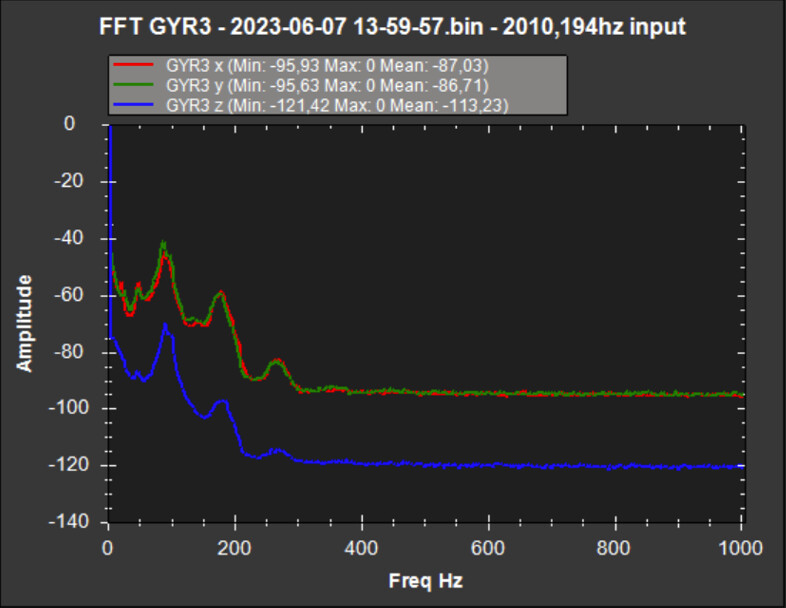
I checked the flight log and saw that magnetic interference is quite high

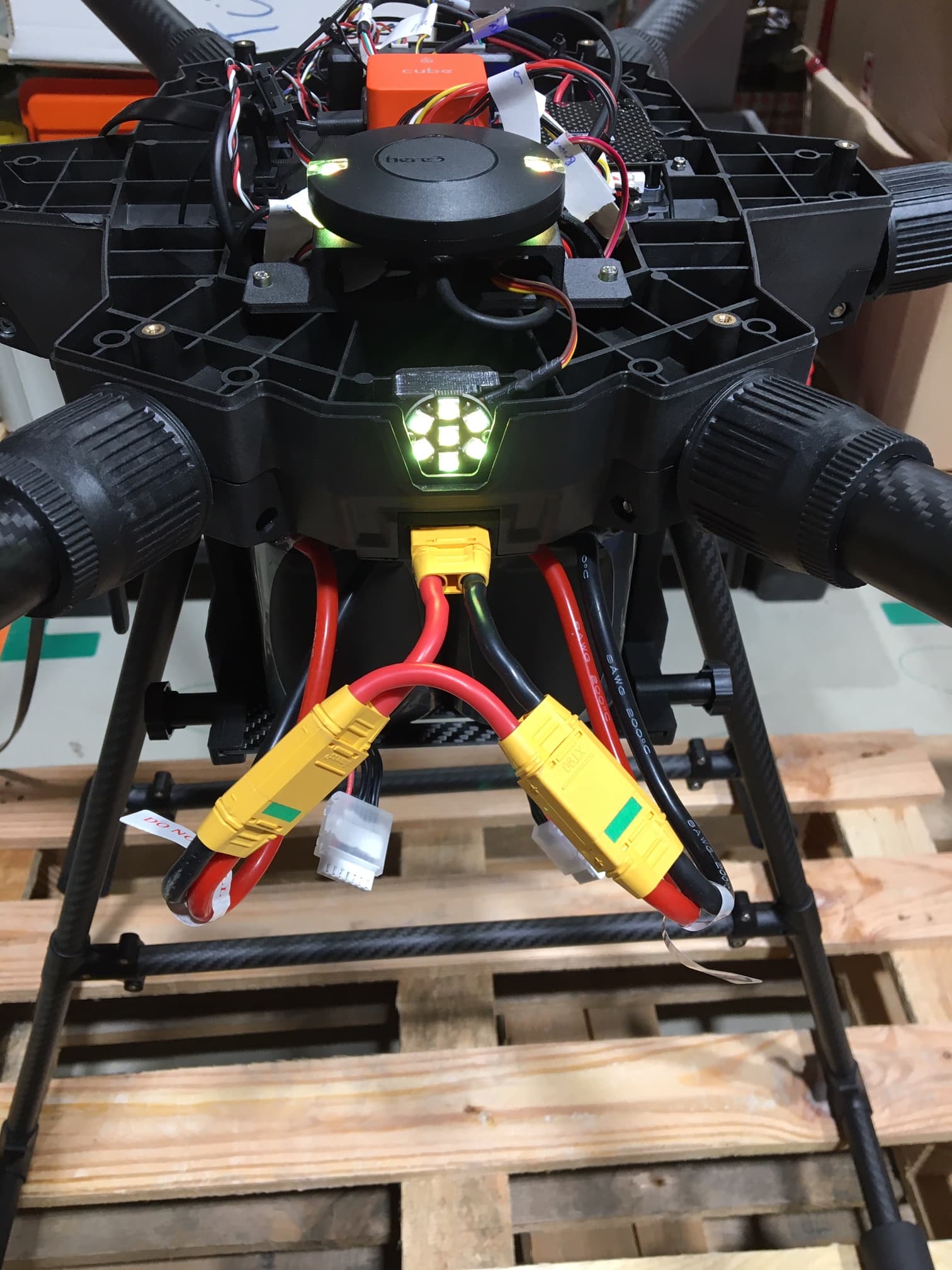
Indeed, the GPS/Compass unit is mounted near the power lines which I found weird as well (please see attached image).
I also saw that in the log the compass-motor calibration was not performed at all, i.e. COMPASS_MOT_X, Y, and Z were zero. Then, I started to think there is magnetic interference in the compass but, I am not really sure.
The one thing that I do not understand is if there is a magnetic interference with the compass, how did RTL work? I was expecting the RTL would also fail if there is a magnetic interference in the compass. Could someone please help me to understand this? If there is no problem with the compass, can someone please help me to find the problem here? I also did not understand why drone goes haywire in stabilize mode? Can magnetic interference in the compass deteriorate the flight performance in stabilize mode?
In the below link, you can find the videos during the flight and also bin log file.
https://drive.google.com/drive/folders/1S9rGMq1NJwddCc9yzczZvRJtv_PB6ts_
Best regards