Could someone confirm or deny if a Lidar is or can be used to assist Vtol landing, that is like, make it slow down as it gets to 1m over ground and such? Sort of like 2 stage landing, 2-40m Xm/s decent and when at 0-2m Ym/s (slower) decent. This would save a lot of battery. Obviously I am referring to autonomous mode.
Or a more nifty option is in case of battery failsafe and landing at remote location, it can circle glide till it gets to 40m according to the lidar, then and only then, switch to transition?
This is a nifty feature, if possible especially for gas planes. If crusie motor stops for whatever reason in the air.
yes, rangefinders are used in VTOL landings. If you use the ICE subsystem (see the ICE_* parameters) then it can also be used to auto-start a petrol motor at a given height, and stop it at a given height on landing.
@tridge Is LIDAR still incorporated during VTOL landing in 3.9.9? What parameters do you set to ensure this happens, because we are not seeing this currently, and it makes for some interesting landings.
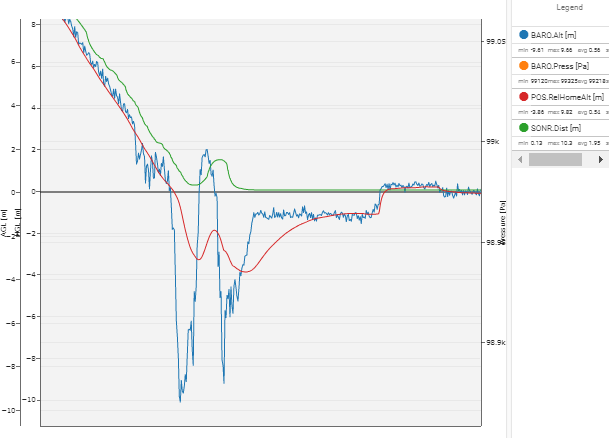
Here is a snip from our logs during an auto landing of our VTOL plane showing the perceived altitude drop in ground effect, causing the aircraft to balloon before coming back to earth a little harder than desired. Meanwhile, the LIDAR knows what’s up, but doesn’t seem to be letting anyone in on the secret. RNGFND_LANDING=1