Hi, I would like to know if Arduplane takes care of Lidar angle during Landing approaches in its calculations. If it is not the Case, is it better to mount the Lidar on a Servo to dynamically adjust angle (like a Gimball) so that it is always strictly downward facing ?
Thanks
1 Like
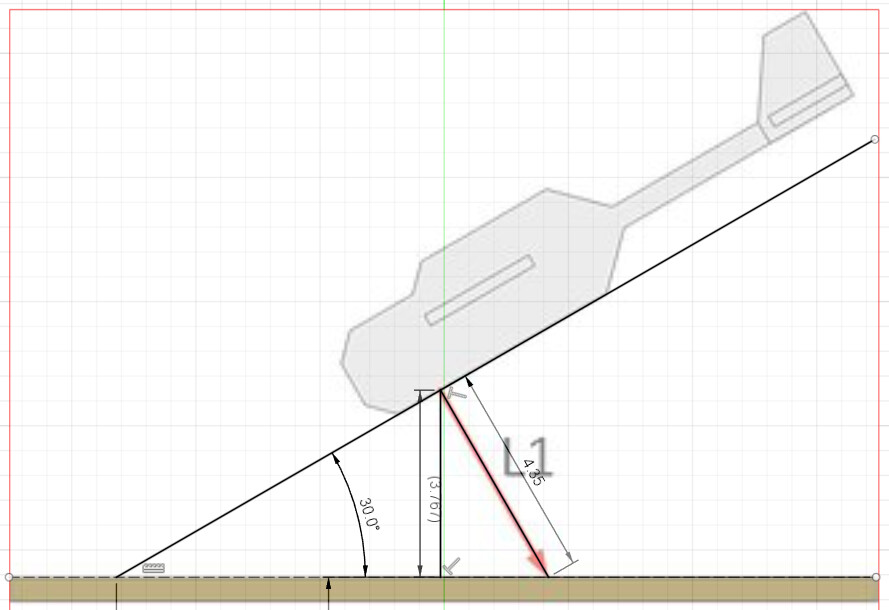
Just a little diagram to explain my question :

Currently my Lidar is like first figure. So measured L1 is greater than real distance to ground L2 because of plane angle when landing. Is it a true problem ? Does Arduplane takes the plane angle into account to correct itself measured Lidar distance ?
Thanks
Bump. - hoping for an answer…
It depends on the sensor used. Though unless you are doing extremely steep approaches the error shouldn’t be noticeably even if it isn’t accounted for.
1 Like
To put that into perspective, a typical approach of 15° has an error of ~3.5%.
Approach angles below 24° have an error of <10%.
In the picture above, the error is about 15.5% with an approach angle of 30°.
1 Like
It does not seem to be calculated during the flight, not that I really believe it is significant for the outcome, as the pitch is not that low at low altitudes,where precision matters.
1 Like
Rather than using a servo to point it downwards, I think it’d be better to just do the math to compensate given that ArduPilot knows the angle of the aircraft.
That said, it would likely only be a noticeable issue in high-performance steep approaches.
If you’re worried about it missing the ground and not flaring soon enough then you could tilt the lidar forward a little so it picks up the ground sooner, the difference it will make once it’s levelled off will be almost nothing since the plane will be almost touching down at that point.