Can pixhawk support this kind of framework? I think it should be OK, but how to configure it? I didn’t find the corresponding configuration instructions on the wiki, which is very sad
strong text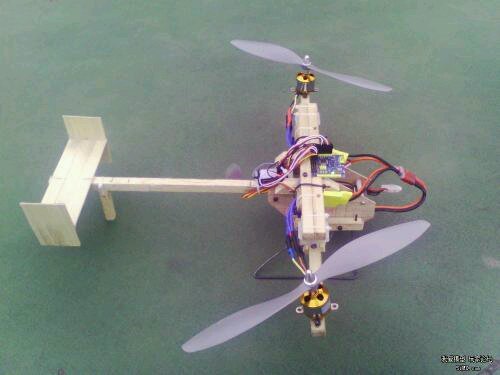
This one fly with iNav

This is the framework. Unfortunately, I didn’t find out how to set it in Wiki
Add a 3rd motor at the rear then it’s supported.
If it works by rotating the 2 motors, perhaps this will help…
Joe
https://discuss.ardupilot.org/t/avatar-style-bi-copter/56937
Thank you very much. This solved my problem
You are welcome. Let me know how it works for you.