I have confirmed that there is a telemetry feature of Dragon Link.
I would like to use the Dragon Link as a telemetry.
First of all, I refer to this link.
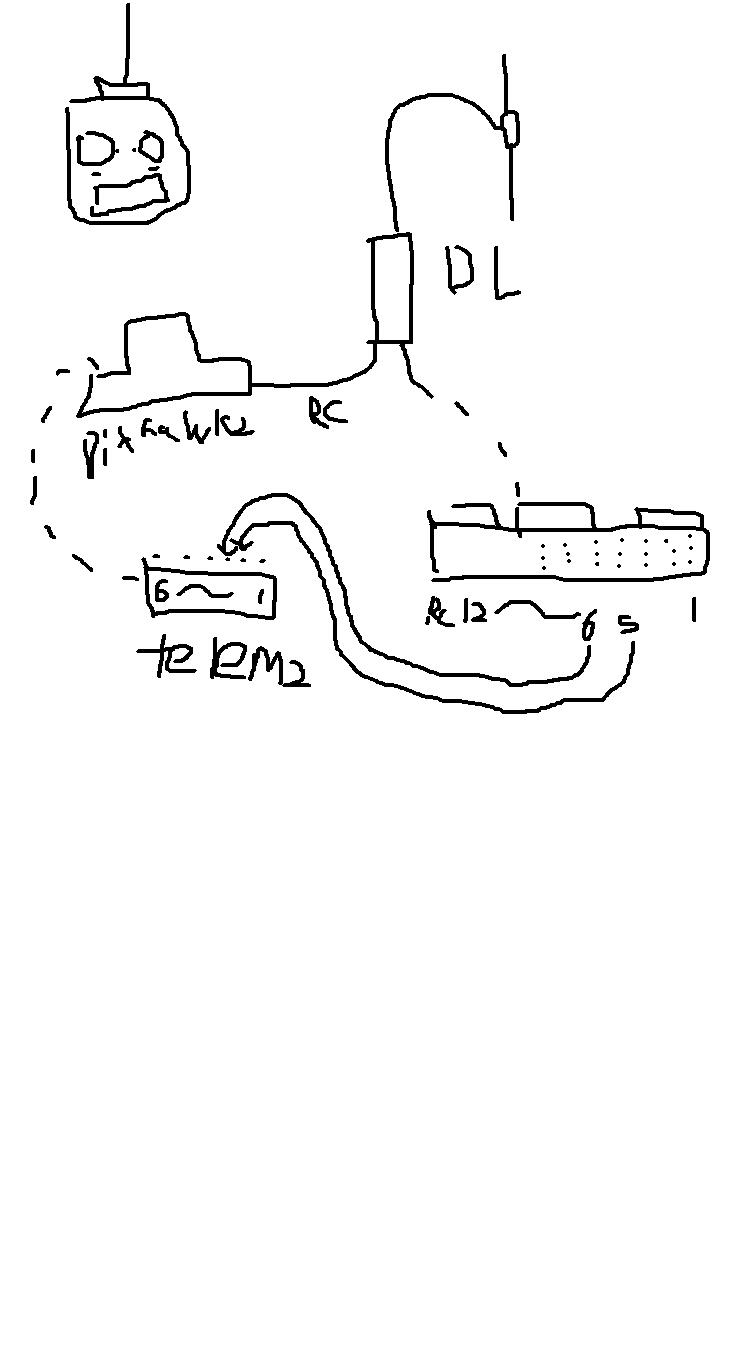
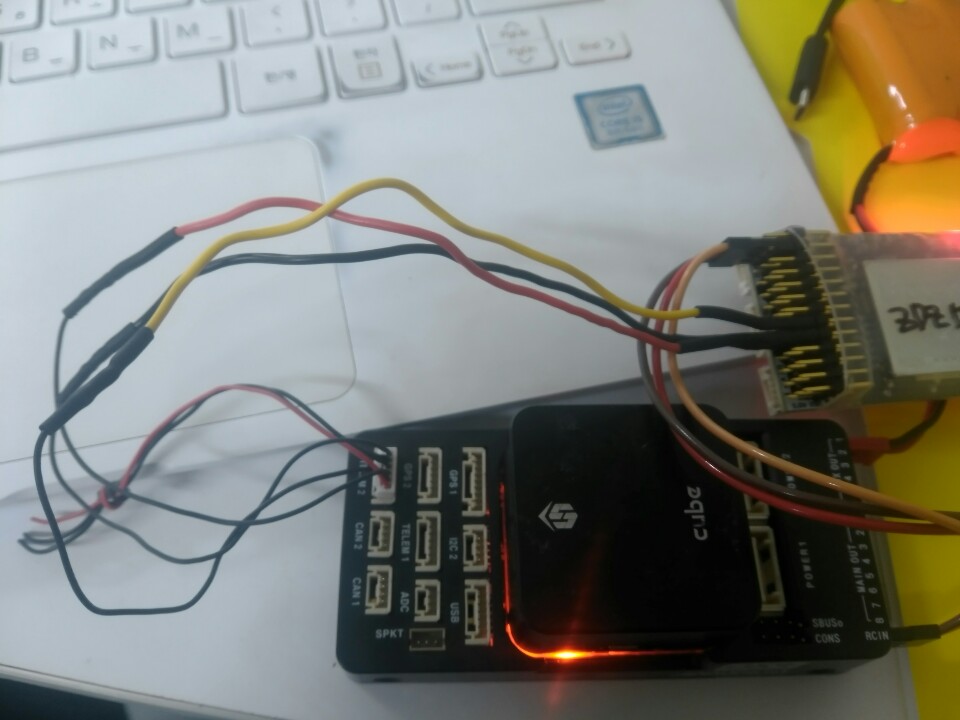
I tried to run it like this.
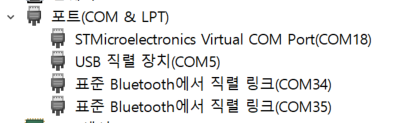
I have picked up the port to connect to in Mission Planner, but pressing the Connect button will freeze the mission planner.
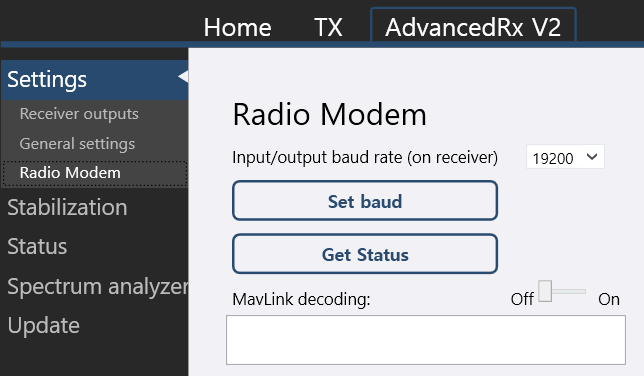
in contrast to previous firmwares it offers additional high data rate settings that allow a full bidirectional telemetry link at ardupilot’s default of 57.6 kbaud. depending on your actual receiver hardware, there’s support for optional flow control too (fullsize RX only).
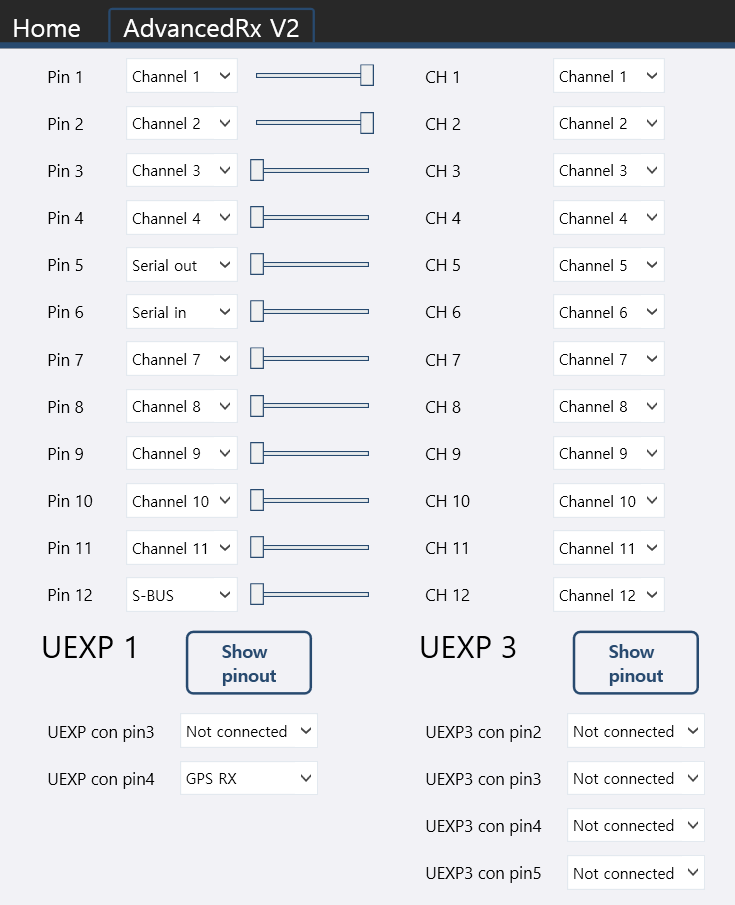
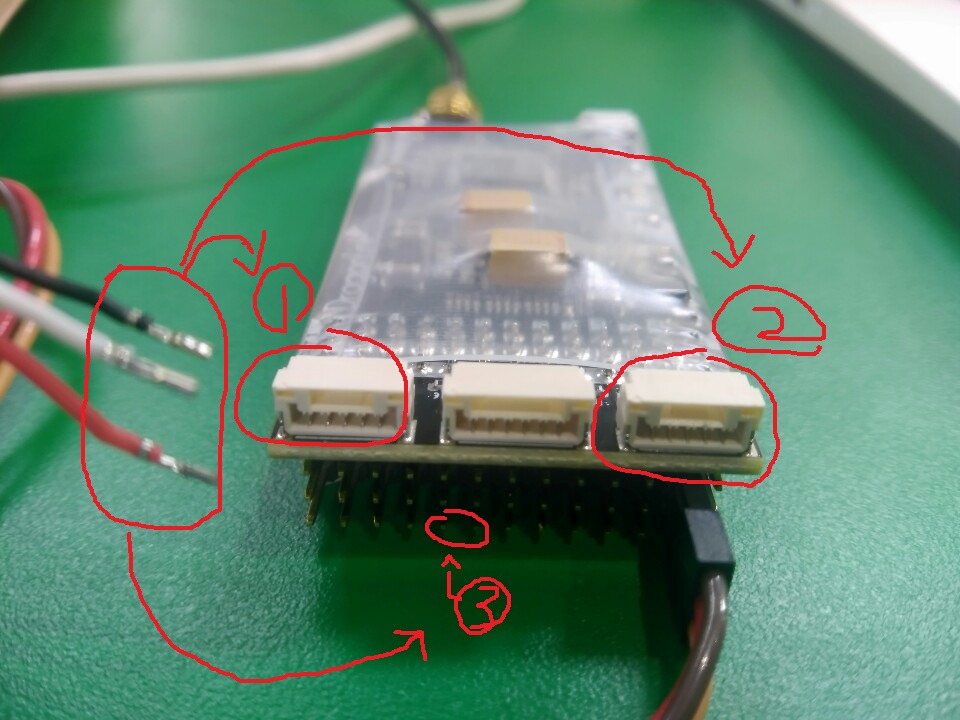
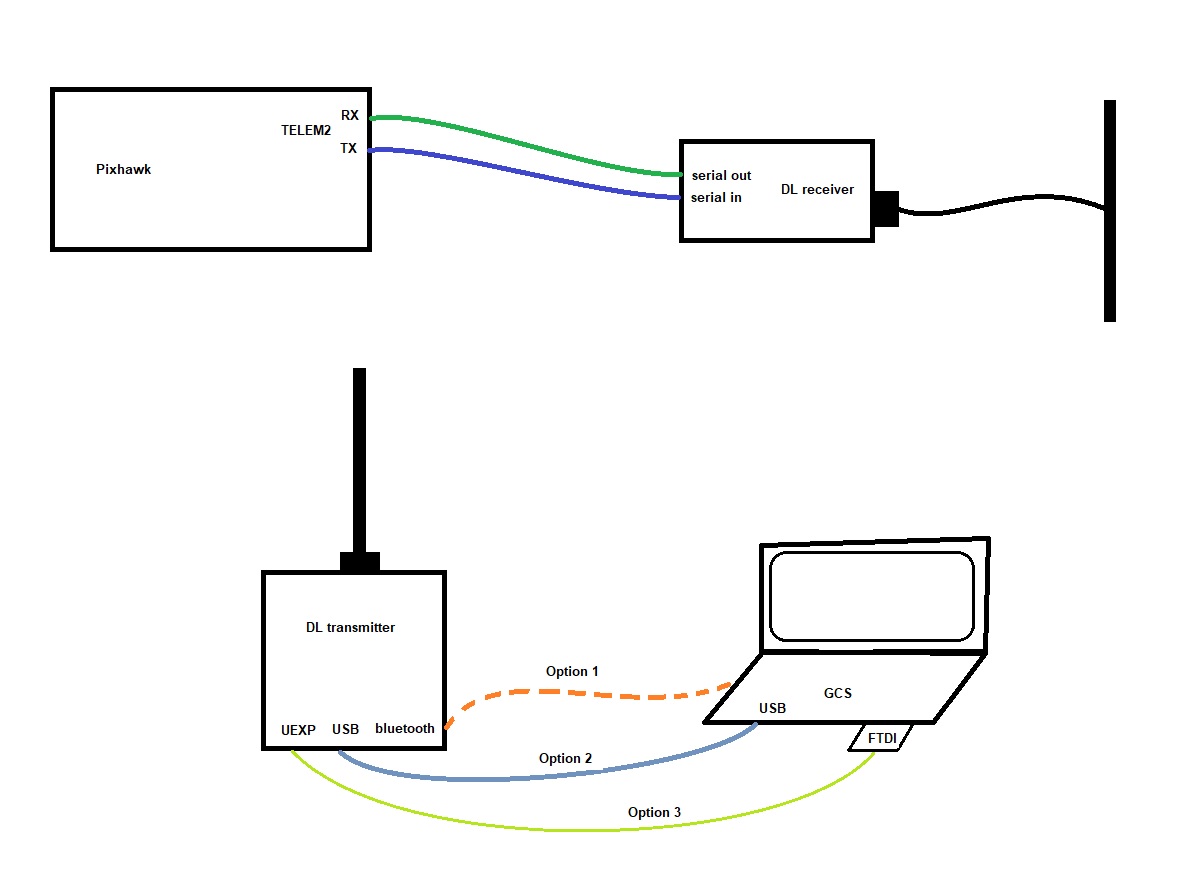
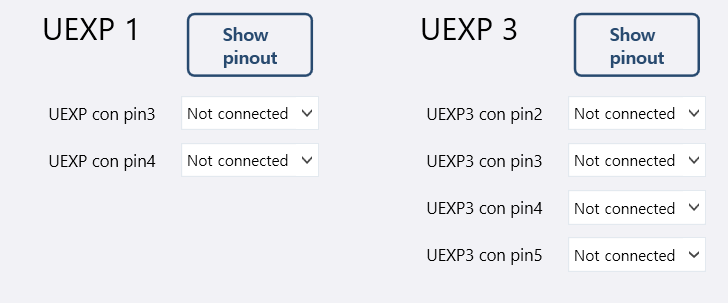
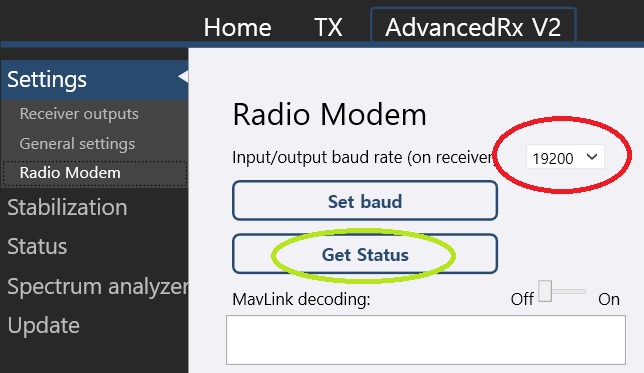
with your DL RX connected to the DL GUI, define two physical pins as serial in (=RX) and serial out (=TX). connect these accordingly to your pixhawk’s telemetry port’s TX / RX pins (RX->TX and vice versa). set the radio modem’s baudrate to match your pixhawk’s serial port’s baudrate. default ist 57.6 kbaud.
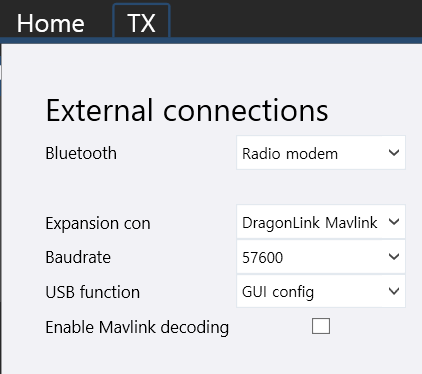
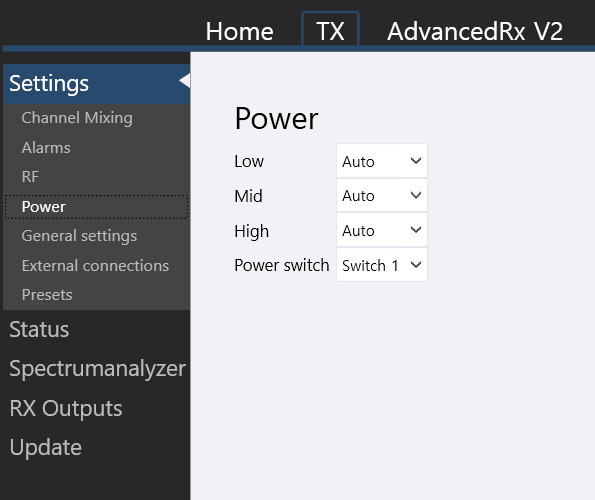
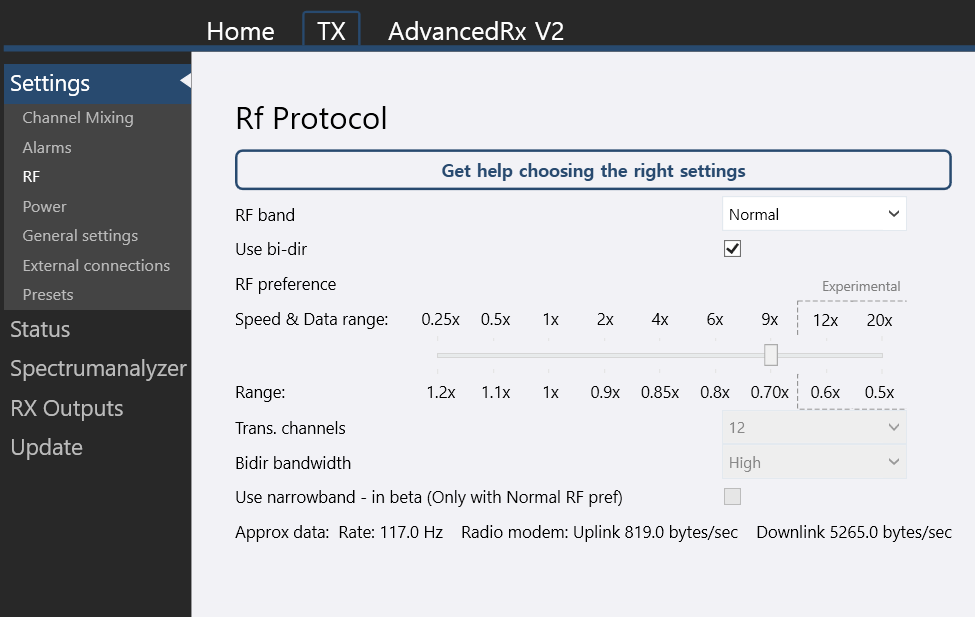
on your TX connected to the DL GUI, adjust RF settings to provide a high enough data rate for your respective baudrate settings. for a default 57.6 kbaud link you’ll need to set “speed & data range” to 9x, offering ~5250 b/s at reasonable range loss. don’t forget to rebind your receciver whenever you change your RF settings.
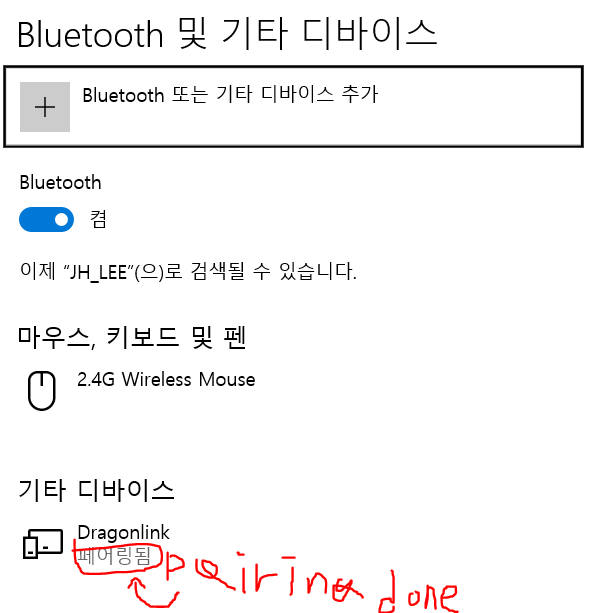
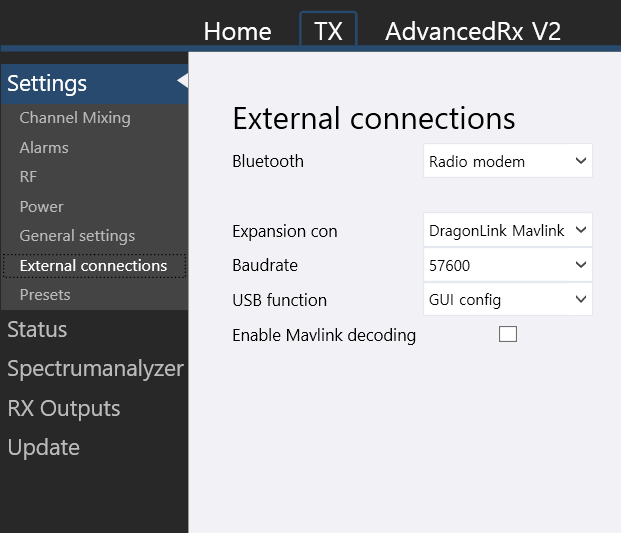
now set the baudrate on your DL TX accordingly and choose the external connection to use for your DL radio modem <-> GCS link. it might be prefereable to first use a wired connection for testing, as it helps to rule out bluetooth connectivity issues while setting things up. once you can connect to your GCS and get telemetry via DragonLink, you can set “bluetooth” as your external connection and proceed with testing.
you‘ve set your DragonLink receiver‘s pins 5 and 6 as serial out and in correctly. that‘s what i meant when saying „physical pins“.
as i said a wired connection to your GCS might facilitate tracking down issues as compared to a bluetooth connection, it‘s just my opinion though. USB is one option.
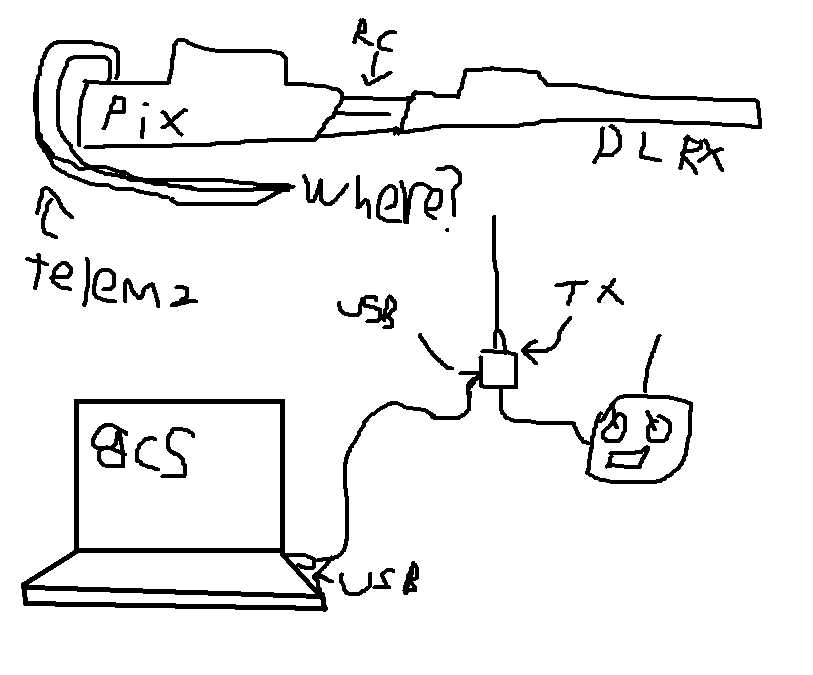
if you’re running your pixhawk’s serial ports on defaults, TELEM2 most likely is the port you want to use.
sorry if i did not make that clear enough, no need to wire your pixhawk to the DragonLink transmitter additionally. when saying „RX->TX“ i was referring to the pixhawk’s telemetry port to DragonLink receiver’s connection, that might have been confusing.
Thank you.
I have some understanding of the TX part.
Finally, this is the question.
RX has three ports that look exactly like the Pixhawk Telem port.
Directly below, there are three pins to which the servo connector can be plugged, ranging from 1 to rssi. (vcc, gnd, sig)
Where should I put the line from this Telem2?
Some guide articles are here, some guide articles there, they are different. I do not know who to believe.
I am very afraid that I have been in the wrong direction so far.
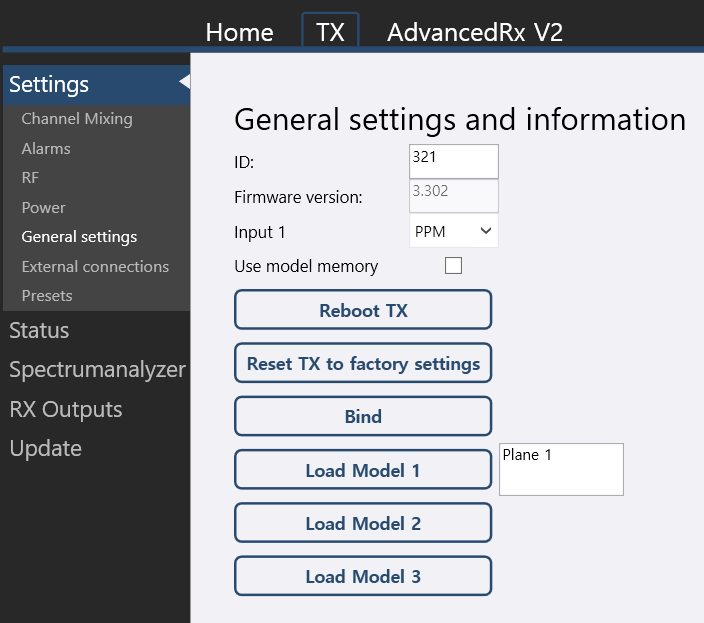
When I connect the Tx to the GCS via usb, what settings should I have?
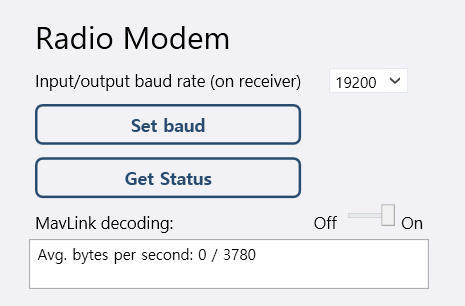
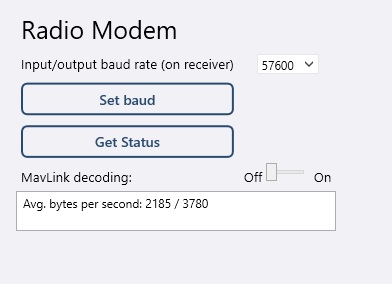
this is average used / available data rate. so there’s no data being sent via radio modem while that screenshot was taken. with an active link you will see the used data rate number increase accrodingly:
again, mind the baudrate settings of your FC’s telemetry port and your DL receiver need to match.
and you need to rebind your reciver
just reset everything to default and follow the instructions above step by step.
else its hard to find out what is wrong