I have just built a drone based upon the S500 frame. FC: Holybro Pixhawk 4, M10 GPS, MT2213 935 KV motor with 1045 props, 3S Lipo battery.
Calibrations, settings and failsafes configured, ESC calibrated, all motors and prop orientations triple checked. in first flight, I tried taking off in AltHold mode. The drone immediately flipped towards the back and broke a back propeller. Tried to lift off again in stabilize mode, but it didn’t tilt but was unstable. So I tethered the drone so it doesn’t come at me, and tried lifting off in a closed space in my terrace (to prevent flyaway). (You can see the video here from a security cam of how the drone behaved. https://youtu.be/nUX3dI5773c)
I know the battery is a little off from the center towards the back, and that was my design as I will attach a camera in the front afterwards. I thought the FC would compensate but it wasn’t the case.
I’m attaching the motor RC PWM log and throttle log. Do you think the motors are underpowered and I need more powerful motors? The final weight is 1.57kg.
I can’t lose 100g as it’s already without the video system now. It’s barebones. And after investing so much in the 3s it’s better for me look for more powerful motor if that will help. What do you suggest?
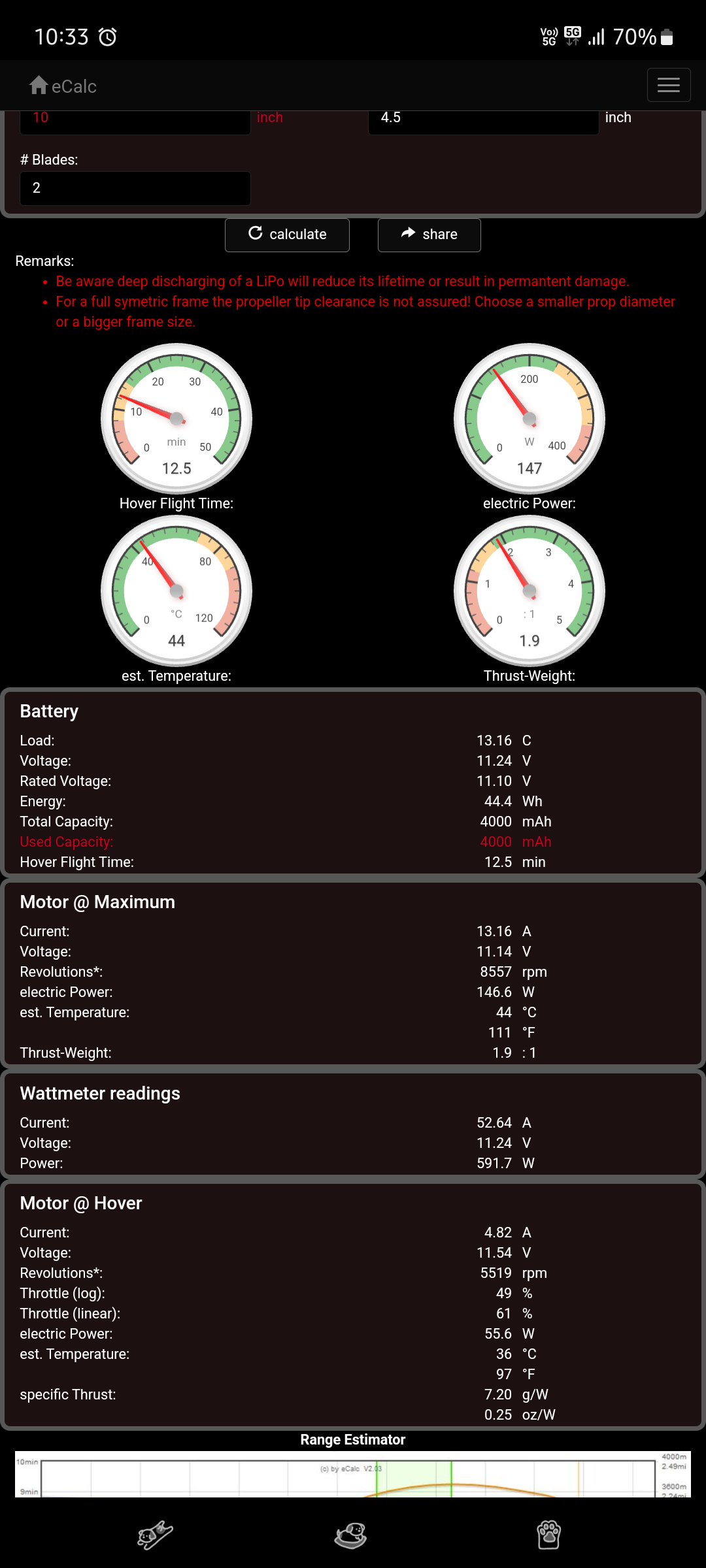
Also ecalc just calculated my quad’s TWR as 1.9 which is optimal as far I have read online.
It’s not optimal it’s underpowered/overweight. With the correct info into eCalc the Motor @ Hover throttle linear is 71%. It needs to be below 50%. You should have built for 4S power like most do with these frames.
If you can not change power train to 4S you may consider changing props to something like 11 or even 12.
Look for one call Slow Fly. They are designed for KV engines like yours, providing high thrust with slow rotation.
My common sense suggests it will be overloaded of course beyond specs. But since you people are quite experienced in this forum so I didn’t double check and directly asked you if there was a way larger props could be made to work. I’m learning.
So it turns out it was the disbalanced battery! I balanced the battery and added all camera gear. Total weight was 1.65kg. It flew on loiter mode with constant pitching and rolling at 5m/s (my set maximum) for around 10 mins before failsafe kicked in at 10.5V.
The quad is not underpowered as it turns out. Here is the flight log for throttle. Average throttle was around 60%
Hello Dave, is a 60% hover throttle acceptable? Considering that this value will be adjusted over time with respect to battery voltage drop, the actual throttle will increase as the battery discharges — meaning if it starts at 60%, it will be higher later on.
I see. So what do you think if the X-frame quad hovers at 30% throttle when empty and around 50% at maximum takeoff weight? What are your insights on it?
I understand it’s not leaving margin for wind resistance. I might upgrade to 2216 motors later on. For now, my aerial video plan, this might be okay. I’ll go to a remote village and test it next week pushing it to its maximum capabilities.
which motor do you recommend if I stick with 3s battery? because these 2213 emax motors as per specs won’t gain any juice with 4s. If I put 4s power I will have to downsize the props to 9" so same problem. They are already outputting maximum thrust in 3s 1045 props.
If I have to invest in battery I will also need to upgrade the motors. So what motors can gain me 2:1 TWR with the same 3S 5200 battery?