Hi guys,
When an drone crashes and the propellors hit the ground do the ESCs get damaged. My drone crashed one while I was flying and motor 1 hit the ground along with the propellor. The motor was damaged so I replaced the motor checked and the esc1 seemed to be working fine(Motor 1 was rotating). The next time I flew it the drone climbed and after a while the esc1 failed and crashed (The drone flipped to that side and one FET was also burnt). Was the esc1 already damaged after my first crash?. While taking off it worked fine but did it burn when the load was too high.
Should we replace the esc when the props hit the ground and how do we check if the esc is working
Indeed, cheap hobby ESC’s are usually damaged when motor stops and there is throttle.
You can test them on a bench with motor and prop and let them run on full throttle for a couple of minutes. (However it is quite dangerous).
More expensive pro and semi pro ESCs have current protection and they stop before damage is done.
@Eosbandi. Thank you for the reply. The ESCs I use are hobbywing xrotor 40A opto esc. Dp these have current protection.
How do you identify a damaged esc from a good one. Does the motor spin slower. The problem I faced was that the esc worked fine when the drone was hovering 2m above ground, but as soon as I increased throttle to take off it failed.
Not want to disappoint you, but AFAIK Xrotor small series (10-20-30-40A) does not have over-current protection. Only the PRO series and BLHeli series with telemetry has current sensing and protection.
@Eosbandi Thank you so much for the reply. As you mentioned earlier, one way to check the ESCs are to rotate them at full throttle. Does it spin differently from a good esc. As in how do you identify the difference between a good and bad esc from the motor spin.
Also another question in my mind, once the esc hit the ground do they become partially damaged or fully damaged. What i mean by this is, in an earlier crash the esc got fully damaged(One of the FETs were burnt and the output was short circuited with the input). But in my last crash, there were not short circuits and the motor1(with the esc1 that would later fail) turned well on the ground. It worked well while hovering 2m above the ground. After increasing the throttle to climb, the motor1 lost thrust and the drone flipped.
Does the esc that gets damaged after props hit the ground work okay when the load is low like during take off and low altitude hovering and fail at high current draw
Thank you in advance
If it is bad it will very likely makes some smoke signals or sparks, even flames
If it works for a couple minutes on more than half throttle with occasional full throttles then it will work.
What happened to my esc was after the first crash, esc1 still worked, but at high throttle it failed causing the crash. I didn’t see any smoke or burn on the esc but the motor1 seemed to have burnt. The esc1 still works when drone takes off but when climbing up at high current the esc fails. So for this esc if i separately check with the props on, should it burn when I increase the throttle >50%
Thank you so much for the reply alberto. So as you mentioned when the props are stopped by a external force it burns. In my case it didnt burn. When I connector a new motor to that esc (Esc1 on my hexarotor) and tested it, it worked fine on the ground. Even during take off there was no problem. It hovered 2m above ground and still there was not problem with esc1. As iI increased throttle and stared climbing the ESC failed causing the motor1 to lose thrust and flip. So my question is during the initial crash where motor1 hit the ground, did the esc get partially damaged. That is it can handle a lower current during takeoff but as throttle is increased it fails. Is this correct. How do I check if the esc is completely okay. Thank you in advance. I have attached a video of my flight and the flight logs as well
well, i must say that is not the true reallity.
Ardupilot has efective colision detection system, so when the drone is in very specific conditions,
puts the throttle to 0%. Crash Check — Copter documentation
A lot of “fligth controllers” come with this features integrated, because as you know,Ardupilot
software and hardware has been copied a lot around the world, because is one of the betters…
I burned myself some of these cheap ESCs, just by holding the prop/motor, and put a 2000us pwm signa
l or a 100% throttle(standar not d-shot), this mosfets just explode or burn and even cach fire helped by
the termal-plastic envolture… so Sahan, you must operate this cheap ESCs under favorable conditions
to prevent these events,
i recomend to you if you can, pursache overdimensionate electronics
to handle more current if you dont want to have an accident of this kind.
Richard Boyhan said:
More than likely you did not damage the ESC. I fly racing drones and crash all the time with no trouble. That is not to say the prop might have hit the ESC and damaged it. To help protect my ESC I tape old props over them to protect them from props hitting them. Good luck. Richard
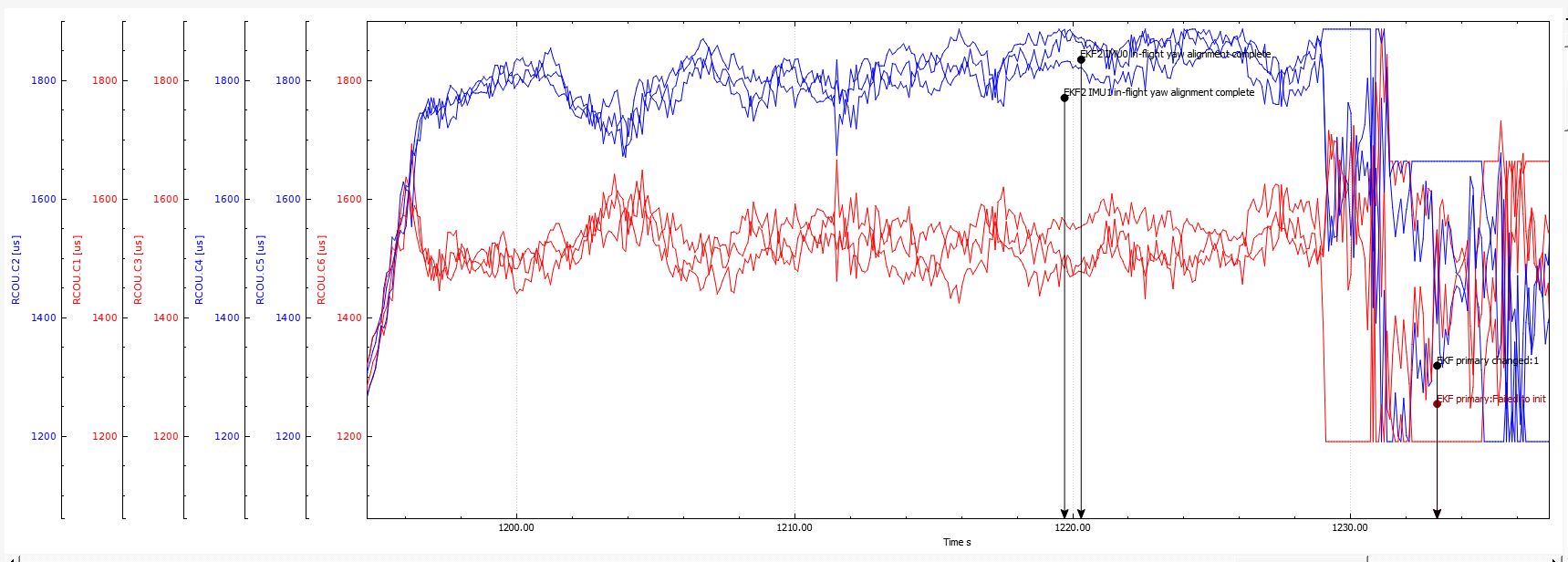
Perhaps you should share the response (large Yaw bias) from your craft before it hit the ground with these people trying to help you? CW and CCW motors shown in Red and Blue for effect.
This is from another thread you opened and you have posted in a 3rd with the same issue.
After a crash and repair, I think the best practice should be to secure the drone to the ground or test bench firmly, and to test all systems including running the motors at full throttle for a few minutes. A lot of things can go wrong with the shock of a crash, so better to trigger potential failures on the ground than in the air.
Of course, one needs to judge to put a safe distance from the drone or at the least keep oneself behind a strong barrier while doing all this in case a shrapnel flies off from a propeller…