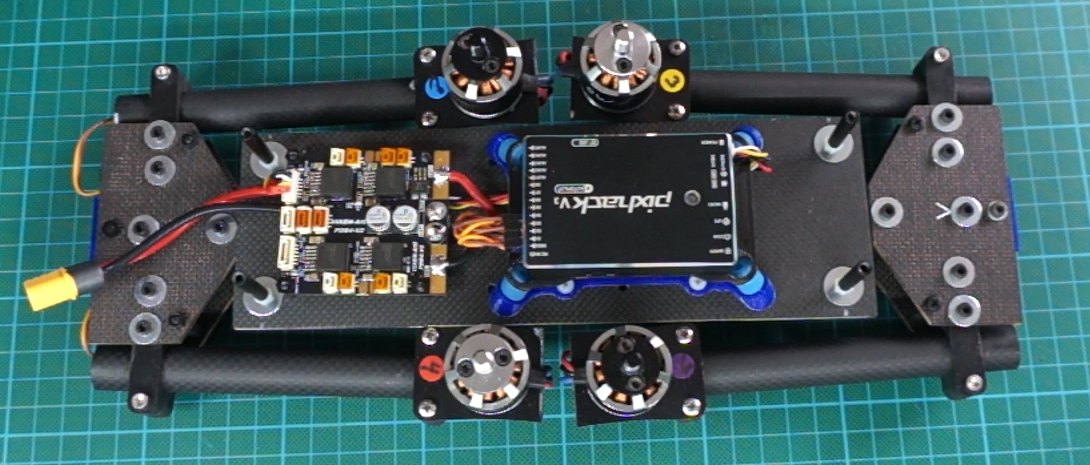
Here is a DIY design & build of a small (300 class, 9" props) compact foldable quadcopter you can take in a backpack, weighing less than a kilogram (including a Drotek RTK GPS, CUAV V3 pro pixhawk autopilot , telemetry radio)
It can fly a good 30 minutes with a 3-axis Gopro type gimbal (subject of part2). The frame is foldable (with and without props attached).
It flies of course with Arducopter firmware V3.4.6.
For those inetrested , I had made a previous review of the CUAV V3 pro (Pixhack) autopilot :
Very good idea! 30 min is very long.
Can you please give more details about this build? What battery are you using to achieve this flight time? And can you send us already some pictures of the quad with attached gimbal before you post part 2?
What material did you use for the foam side panels and did you attached them to the frame?
Are you willing to publish some drawings and the complete spec for this clever design?
There is a very similar solution to the same configuration here (in German, translatable in Firefox or Chrome), for you information: https://open-diy-projects.com/globeflyer/
Best DP
I assume that CNC carbon fiber laminated material is lighter than solid carbon fiber? Is there an advantage to not just using 2mm 3K carbon fiber?
Would love to see more. If this can actually fly for 30 mins with 9 inch props and gopro gimbal that would be impressive. In fact I will make one…if you publish the designs. Or are you selling kits?
Look forward to the follow up video and please show current draw in hover and forward flight, what motor/prop/esc combo you are using.
Well that was educational Olivier! I imagine the strength is immaterial as either are strong enough but the rigidity is much much more pronounced for the birch plywood.
For sure a Nice build, congrats. Something I actually wanted to have for a long time.
BUT 30 mins flight time…no way.
Not with those motors and props.
You’ll get 18-20 mins max.
But seeing is believing.
When you get a chance, please post your best flights times and battery config.
Hello,
Sorry I did not answer questions sooner, I was gone on holidays.
There was a question about selling kits : I did not intend to sell kits. The design is so simple, people could copy it for very cheap : buy a 20x20 CF rectangular tube at hobbyking, 16mm CF tubes for the arms, and CF plates (or CF/balsa plates) for the four body plates, standard 16mm clamps.
There was a question about the motor/ESC/prop config : T motor MN2213 950Kv, Hobbyking Afro slim 20A ESCs, T-Motor 9x4.5 plastic props.
There was a question on why not using solid CF plates : they are two times heavier than balsa/CF sandwiches.
There was a question on endurance. I did not finish all field test measurements but here’s my current results:
-measured 33 min on Lipo 3S 5200 Mah, without a payload and without landing gear
-measured 21 min on LiPo 4S 6600 Mah with the gimbal attached and with a landing gear (full load). 4S is required on full load instead of 3S to be able to produce enough thrust per motor, due to weight increase.
I still have to test in the field a 4S3P LiIon battery pack that should theoritically give more than 30 minutes fully loaded (calculation based on the measured total current consumption when fully loaded), as confirmed theoritically by the following graph, with a 5A discharge current per parallel line of cells (15A total ship consumption to loiter):
I fully support your flight time numbers. My new build with 9.5" props and with 200g payload has a flight time of 36min (auto survey mission) . However, I am wondering about your 3S and 4S comparison, because I was using a 4S LiPo for that flight time.
I am also wondering about the 15A total ship consumption you mention. My build draws about 8A to 10A in average and I thought your build should consume less. But, I calibrated the sensor a while back and I am normally working with larger hexa copter, so I have to double check.
What is the weight of your gimbal and the Gopro together? Also, what is the weight of your 4S3P LiIon battery pack?
Sorry for a late reply,
About my amps consumption, I might have to recalibrate MP for my sensor. It would be a good news if I over estimated by 5 amps !
The weight of the gimbal (ZTiny2) is about 200 grams. The weight of my YI 4K (Gopro clone) camera is same as a Gopro.
The weight of a 4S3P pack is about 600 grams (using the Panasonic 18650 GA cells)
Cheers
thanks for the reply!
I am still a little confused about your “21 min on LiPo 4S 6600 Mah”. It should be (much) more. The weight of your 4S3P is less compared to the LiPo I’m using, but heavier than I expected. So what the the weight of the quad including landing gear, but without battery, gimbal and camera?