Hi, I am making a boat with two motors, and no rudders controlled by ardurover.
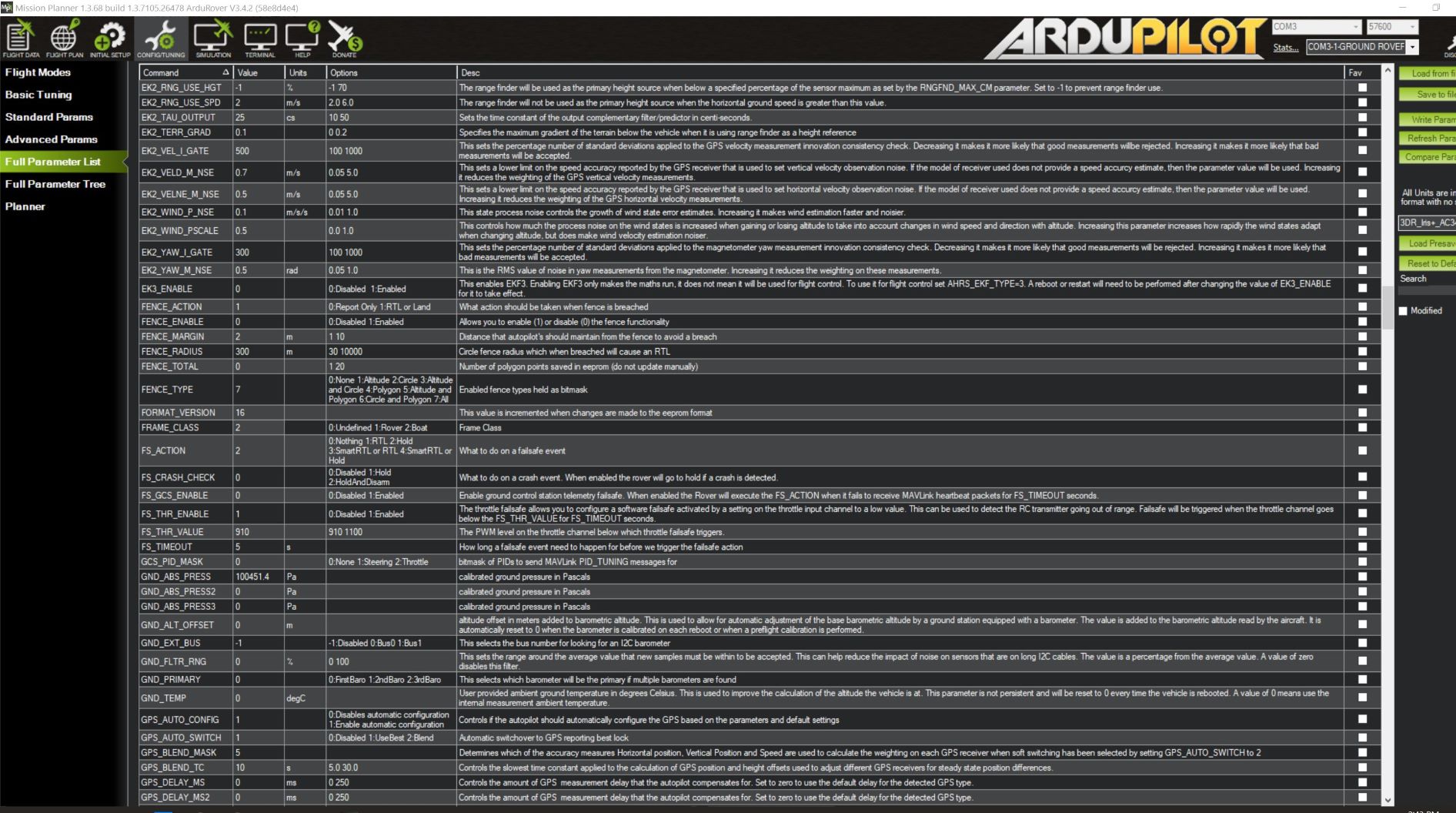
From this thread, it seems that you should only need to set frame_class to 2, and frame_type to 0, but my mission planner full parameter list does not even list frame_type as an option. In the picture below, you can see that the frame_type parameter does not show up.
What parameters should I change to get diff steer?
Is there a different way to set up differential steer?